WebRTC源码分析-线程基础1
原文出处:WebRTC源码分析-线程基础概述
WebRTC实现了跨平台(Windows,MacOS,Linux,IOS,Android)的线程类rtc::Thread,WebRTC内部的network_thread,worker_thread,signaling_thread均是该类的实例。该类的源码位于rtc_base目录下的thread.h与thread.cc中。
基础功能
rtc:: Thread及其相关类,ThreadManager、MessageQueue,Runnable等等一起提供了如下的基础功能:
- 线程的管理:通过ThreadManager单例对象,可以管理所有的Thread实例;
- 线程的常规基本功能:rtc:: Thread提供创建线程对象,设置线程名称,启动线程去执行用户代码;
- 消息循环,消息投递:rtc:: Thread通过继承MessageQueue类,提供了内部消息循环,并提供了线程间异步,同步投递消息的功能;
- 跨线程执行方法:提供了跨线程执行方法,并返回执行结果的功能。该功能非常强大,因为WebRTC在某些功能模块的使用上,有要求其必需在指定的线程中才能调用的基本要求,比如音频模块:ADM 的创建必须要在 WebRTC 的 worker thread 中进行;
- 多路分离器:通过持有SocketServer对象,实现了多路分离器的功能,能处理网络IO;
原文出处:WebRTC源码分析-线程基础之线程管理
前言
WebRTC中的线程管理是通过ThreadManager对象来实施的,该类起着牧羊者的作用,rtc::Thread类对象就是羊群。其通过什么样的技术来实现对rtc::Thread管理的?在不同的系统平台下如何实现?下文将进行阐述。
该类的声明和定义与Thread类一样,位于rtc_base目录下的thread.h与thread.cc文件中。先看其类的声明:
class ThreadManager {
public:
static const int kForever = -1;
static ThreadManager* Instance();
Thread* CurrentThread();
void SetCurrentThread(Thread* thread);
Thread* WrapCurrentThread();
void UnwrapCurrentThread();
bool IsMainThread();
private:
ThreadManager();
~ThreadManager();
#if defined(WEBRTC_POSIX)
pthread_key_t key_;
#endif
#if defined(WEBRTC_WIN)
const DWORD key_;
#endif
const PlatformThreadRef main_thread_ref_;
RTC_DISALLOW_COPY_AND_ASSIGN(ThreadManager);
};
ThreadManager的构造
ThreadManager实现为单例模式,通过静态方法Instance()来获取唯一的实例。其构造与 析构函数均声明为private。
先看静态方法Instance的实现:
ThreadManager* ThreadManager::Instance() {
static ThreadManager* const thread_manager = new ThreadManager();
return thread_manager;
}
该方法很简单,但是注意这个方法不是线程安全的,那么在WebRTC的多线程环境下是如何保证ThreadManager对象被安全的构造?WebRTC通过一定机制确保了Instance()方法第一次的调用肯定是在单线程的环境下,也即在主线程中被调用,因此是线程安全的。如何实现这点?
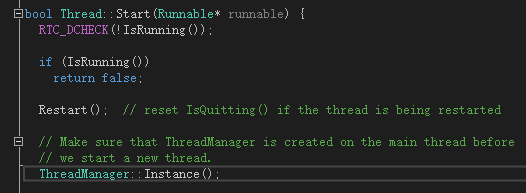
- WebRTC中启动新线程的标准方法是通过创建Thread对象,然后调用Thread.Start()方法来启用新的线程,而该方法的内部会直接调用一次Insance(),如下截图:
- WebRTC启动新线程的非标准方法,即用户继承了Thread对象,并且不能通过Thread.Start()方法来启用新线程。此时,WebRTC中是如何保证这点的?如下截图,Thread的WrapCurrent()方法的说明以及其实现说明了此种情况:
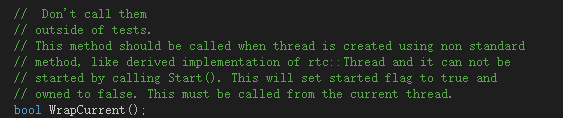
继承Thread的类,如果不能通过Thread.Start()来启动线程时,应该在构造中调用WrapCurrent()方法,该方法如下图所示,首先就会调用ThreadManager::Instance()来获取ThreadManager的单例对象。

至此,WebRTC通过上述的方式确保了ThreadManager对象被安全的构造。
private构造函数的实现:
#if defined(WEBRTC_POSIX)
ThreadManager::ThreadManager() : main_thread_ref_(CurrentThreadRef()) {
#if defined(WEBRTC_MAC)
InitCocoaMultiThreading();
#endif
pthread_key_create(&key_, nullptr);
}
#endif
#if defined(WEBRTC_WIN)
ThreadManager::ThreadManager()
: key_(TlsAlloc()), main_thread_ref_(CurrentThreadRef()) {}
#endif
我们可以看到在Windows和类Unix系统中实现进行了区分,WEBRTC_POSIX宏表征该系统是类Unix系统,而WEBRTC_WIN宏表征是Windows系统。虽然实现稍微有些许不同,在MAC下还需要调用InitCocoaMultiThreading()方法来初始化多线程库。但是两个构造函数均初始化了成员key_与main_thread_ref_(我们可以看到WebRTC中的私有成员均以下划线_结尾)。其中key_是线程管理的关键。
_key_的初始化:在Windows平台上,key_被声明为DWORD类型,赋值为TlsAlloc()函数的返回值,TlsAlloc()函数是Windows的系统API,Tls表示的是线程局部存储Thread Local Storage的缩写,其为每个可能的线程分配了一个线程局部变量的槽位,该槽位用来存储WebRTC的Thread线程对象指针。如果不了解相关概念,可以看微软的官方文档,或者TLS--线程局部存储这篇博客来了解。在类Unix系统上,key_被声明pthread_key_t类型,使用方法pthread_key_create(&key_, nullptr);赋值。实质是类Unix系统上的线程局部存储实现,隶属于线程库pthread,因此方法与变量均以pthread开头。总之,在ThreadManager的构造之初,WebRTC就为各个线程所对应的Thread对象制造了一个线程局部变量的槽位,成为多线程管理的关键。
_main_thread_ref_的初始化:该成员为PlatformThreadRef类型的对象,赋值为CurrentThreadRef()方法的返回值,如下源码所示:在Windows系统下,取值为WinAPI GetCurrentThreadId()返回的当前线程描述符,DWORD类型;在FUCHSIA系统下(该系统是Google新开发的操作系统,像Android还是基于Linux内核属于类Unix范畴,遵循POSIX规范,但FUCHSIA是基于新内核zircon开发的),返回zx_thread_self(),zx_handle_t类型;在类Unix系统下,通过pthread库的pthread_self()返回,pthread_t类型。总之,如前文所述,这部分代码肯定是在主线程中所运行,因此,main_thread_ref_存储了主线程TID在不同平台下的不同表示。
PlatformThreadRef CurrentThreadRef() {
#if defined(WEBRTC_WIN)
return GetCurrentThreadId();
#elif defined(WEBRTC_FUCHSIA)
return zx_thread_self();
#elif defined(WEBRTC_POSIX)
return pthread_self();
#endif
}
private析构函数的实现:
ThreadManager::~ThreadManager() {
// By above RTC_DEFINE_STATIC_LOCAL.
RTC_NOTREACHED() << "ThreadManager should never be destructed.";
}
根据日志,我们看到ThreadManager单例对象的析构函数是永不会被调用的,直到整个进程结束自动去释放该对象所占用的空间。否则,会触发断言,在标准错误输出上述错误日志后,调用系统的abort()函数。后续会对RTC_NOTREACHED宏进行展开描述,看看其究竟是如何处理的。
获取,设置当前线程关联的Thread对象
#if defined(WEBRTC_WIN)
Thread* ThreadManager::CurrentThread() {
return static_cast<Thread*>(TlsGetValue(key_));
}
void ThreadManager::SetCurrentThread(Thread* thread) {
RTC_DCHECK(!CurrentThread() || !thread);
TlsSetValue(key_, thread);
}
#endif
#if defined(WEBRTC_POSIX)
Thread* ThreadManager::CurrentThread() {
return static_cast<Thread*>(pthread_getspecific(key_));
}
void ThreadManager::SetCurrentThread(Thread* thread) {
#if RTC_DLOG_IS_ON
if (CurrentThread() && thread) {
RTC_DLOG(LS_ERROR) << "SetCurrentThread: Overwriting an existing value?";
}
#endif // RTC_DLOG_IS_ON
pthread_setspecific(key_, thread);
}
#endif
如前文所述,不论是何种平台,在ThreadManager的构造之初就为Thread指针分配了线程局部存储的槽位key_,通过不同平台的get,set方法就可 以将当前线程所关联的Thread对象指针从该槽位取出或设置进去。但是,有这么几个点需要注意:
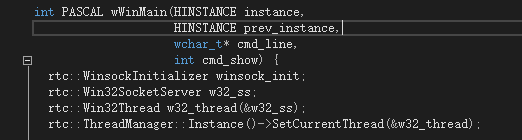
- Thread是用户层线程的表征,可以通过其来访问,操作该线程在内核中的数据结构。但用户层和内核层的线程表征,二者并非是共存关系。以主线程来说,进程一运行起来其线程内核结构就存在,但是用户层主线程的表征Thread对象是不存在的,因此,在程序入口main()函数开头调用ThreadManager::CurrentThread()方法,得到的必然是空指针。如果想要将主线程纳入管理,必然要先创建一个Thread对象,然后调用ThreadManager::SetCurrentThread(Thread* thread)设置到当前线程的线程局部存储的槽位中。正如example目录下的
peerconnection_client示例工程那样做的,其中Win32Thread就是Thread类的子类。
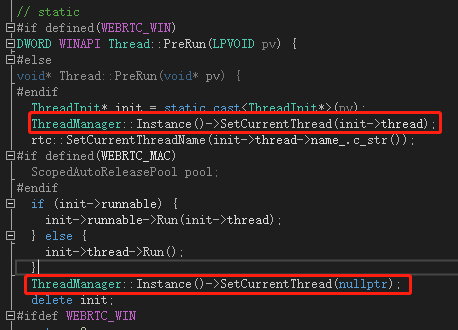
- 对于非主线程,如何纳入管理?由前文所说,主线程外,WebRTC的其他线程以Thread.Start()来启动,新的线程中会执行Thread.PreRun()方法。该方法中就调用了ThreadManager::SetCurrentThread(Thread* thread)方法将新的线程纳入ThreadManager的管理,在线程结束后,调用ThreadManager::SetCurrentThread(nullptr)解除管理。
包装当前线程为Thread对象,当前线程去包装
Thread* ThreadManager::WrapCurrentThread() {
Thread* result = CurrentThread();
if (nullptr == result) {
result = new Thread(SocketServer::CreateDefault());
result->WrapCurrentWithThreadManager(this, true);
}
return result;
}
如果已经有Thread对象与当前线程关联,那么直接返回该对象。否则构造一个新的Thread对象,并通过该对象的WrapCurrentWithThreadManager()方法将新建的Thread对象纳入ThreadManager的管理之中:
bool Thread::WrapCurrentWithThreadManager(ThreadManager* thread_manager,
bool need_synchronize_access) {
RTC_DCHECK(!IsRunning());
#if defined(WEBRTC_WIN)
if (need_synchronize_access) {
// We explicitly ask for no rights other than synchronization.
// This gives us the best chance of succeeding.
thread_ = OpenThread(SYNCHRONIZE, FALSE, GetCurrentThreadId());
if (!thread_) {
RTC_LOG_GLE(LS_ERROR) << "Unable to get handle to thread.";
return false;
}
thread_id_ = GetCurrentThreadId();
}
#elif defined(WEBRTC_POSIX)
thread_ = pthread_self();
#endif
owned_ = false;
thread_manager->SetCurrentThread(this);
return true;
}
在Windows系统与类Unix系统下的差别一点在于Thread.thread_的赋值方式。Windows系统上,使用OpenThread()来打开当前已存在的线程,获取其句柄,此处注明只获取该线程的同步操作权限,也即在该线程进行Wait等操作,这样能提高该方法的成功率;而类Unix系统上,使用pthread库的pthread_self()方法来获取当前线程pthread_t对象。另外将Thread.owned_标志位置位false,表示该线程对象是通过wrap而来,而非调用Thread.Start的标准方式而来。最后使用 ThreadManager.SetCurrentThread方法将新创建的Thread对象纳入管理。
void ThreadManager::UnwrapCurrentThread() {
Thread* t = CurrentThread();
if (t && !(t->IsOwned())) {
t->UnwrapCurrent();
delete t;
}
}
对于线程的unwrap操作,会根据该线程是不是wrap而来,即owned_是否为false,来决定是否进行正真的unwrap操作。如果是的话,就调用Thread.UnwrapCurrent方法进行实际操作,并最后删除Thread对象。
void Thread::UnwrapCurrent() {
// Clears the platform-specific thread-specific storage.
ThreadManager::Instance()->SetCurrentThread(nullptr);
#if defined(WEBRTC_WIN)
if (thread_ != nullptr) {
if (!CloseHandle(thread_)) {
RTC_LOG_GLE(LS_ERROR)
<< "When unwrapping thread, failed to close handle.";
}
thread_ = nullptr;
thread_id_ = 0;
}
#elif defined(WEBRTC_POSIX)
thread_ = 0;
#endif
}
unwrap操作首先需要将当前线程对象所占的槽位置空,即调用ThreadManager::Instance()->SetCurrentThread(nullptr); 来完成。其次是销毁线程的句柄,在Windows下需要先调用CloseHandle(thread_)销毁句柄,然后句柄置空,类Unix系统下直接将成员thread_置空即可。
判断当前线程是否为主线程
bool ThreadManager::IsMainThread() {
return IsThreadRefEqual(CurrentThreadRef(), main_thread_ref_);
}
bool IsThreadRefEqual(const PlatformThreadRef& a, const PlatformThreadRef& b) {
#if defined(WEBRTC_WIN) || defined(WEBRTC_FUCHSIA)
return a == b;
#elif defined(WEBRTC_POSIX)
return pthread_equal(a, b);
#endif
}
没有太多要说明的,注意类Unix系统下使用pthread库中的pthread_equal()方法进行判断。
总结
- WebRTC中ThreadManager类扮演者牧羊者的角色,通过线程局部存储(TLS,Thread Local Storage)的技术提供了对Thread管理,而这种管理其实就是为每个线程包装一个与其相关联的rtc::Thread类对象,并将该对象的地址存储在线程本身的局部存储的某个槽中。
- 不同平台的TLS实现API是不一样的,在Windows上通过Windows API TlsAlloc()来分配槽位(即key值),对应于类Unix系统使用pthread库中的
pthread_key_create()来分配;为获取或者设置槽位中的值(即Thread对象地址),在Windows上使用TlsGetValue()和TlsSetValue(),对应于类Unix系统使用pthread_getspecific()与pthread_setspecific() - ThreadManager类对象是个单例,但是一个非线程安全的实现,如何保证ThreadManager对象的在WebRTC的多线程环境下安全的初始化?
前言
如之前的总述文章所述,rtc::Thread类封装了WebRTC中线程的一般功能,比如设置线程名称,启动线程执行用户代码,线程的join,sleep,run,stop等方法;同时也提供了线程内部的消息循环,以及线程之间以同步、异步方式投递消息,同步方式在目标线程执行方法并返回结果等线程之间交互的方式;另外,每个线程均持有SocketServer类成员对象,该类实现了IO多路复用功能。
本文将针对rtc::Thread类所提供的基础线程功能来进行介绍,Thread类在rtc_base目录下的thread.h中声明,如下(删除了其他非线程基础功能的API,其他的API将于另外的文章中分析):
class RTC_LOCKABLE Thread : public MessageQueue {
public:
// 线程的构造,析构
Thread();
explicit Thread(SocketServer* ss);
explicit Thread(std::unique_ptr<SocketServer> ss);
Thread(SocketServer* ss, bool do_init);
Thread(std::unique_ptr<SocketServer> ss, bool do_init);
~Thread() override;
static std::unique_ptr<Thread> CreateWithSocketServer();
static std::unique_ptr<Thread> Create();
// 线程的名字
const std::string& name() const { return name_; }
bool SetName(const std::string& name, const void* obj);
// 当前线程
static Thread* Current();
bool IsCurrent() const;
// 阻塞权限
bool SetAllowBlockingCalls(bool allow);
static void AssertBlockingIsAllowedOnCurrentThread();
// 休眠
static bool SleepMs(int millis);
// 线程的启动与停止
bool Start(Runnable* runnable = nullptr);
virtual void Stop();
virtual void Run();
// 线程的Wrap
bool IsOwned();
bool WrapCurrent();
void UnwrapCurrent();
protected:
void SafeWrapCurrent();
// 等待线程结束
void Join();
private:
#if defined(WEBRTC_WIN)
static DWORD WINAPI PreRun(LPVOID context);
#else
static void* PreRun(void* pv);
#endif
bool WrapCurrentWithThreadManager(ThreadManager* thread_manager,
bool need_synchronize_access);
bool IsRunning();
std::string name_;
#if defined(WEBRTC_POSIX)
pthread_t thread_ = 0;
#endif
#if defined(WEBRTC_WIN)
HANDLE thread_ = nullptr;
DWORD thread_id_ = 0;
#endif
bool owned_ = true;
friend class ThreadManager;
RTC_DISALLOW_COPY_AND_ASSIGN(Thread);
};
Thread对象的创建
创建Thread对象的构造方法有5个,如下源码所示:
// DEPRECATED.
Thread::Thread() : Thread(SocketServer::CreateDefault()) {}
Thread::Thread(SocketServer* ss) : Thread(ss, /*do_init=*/true) {}
Thread::Thread(std::unique_ptr<SocketServer> ss)
: Thread(std::move(ss), /*do_init=*/true) {}
Thread::Thread(SocketServer* ss, bool do_init)
: MessageQueue(ss, /*do_init=*/false) {
SetName("Thread", this); // default name
if (do_init) {
DoInit();
}
}
Thread::Thread(std::unique_ptr<SocketServer> ss, bool do_init)
: MessageQueue(std::move(ss), false) {
SetName("Thread", this); // default name
if (do_init) {
DoInit();
}
}
需要注意的是:
默认构造函数Thread()被标注为DEPRECATED,原因是其对外隐藏了一个事实,即Thread对象是否与一个SocketServer对象绑定。实际上该默认构造会创建一个SocketServer对象绑定到Thread对象,而大多数的应用场景下Thread对象不需要SocketServer。因此,源码的注释中告知使用Create*的两个静态方法来创建Thread对象。
两个explicit声明的单个入参的构造函数,分别会调用含有两个入参的构造函数,唯一的区别在于入参是SocketServer*指针还是智能指针
std::unique_ptr<SocketServer>类型。如果是后者那么需要使用std::move来转移SocketServer的拥有权(std::move是一个c++11的语法糖,实现了移动语义,详细的分析可以见博客C++11 std::move和std::forward)。但无论是哪个构造函数,都需要做以下三件事:
1) 构造父对象MQ。由于Thread继承于MessageQueue对象,因此首先构造MQ父对象,调用MQ的构造函数,传入SocketServer对象指针以及布尔值false。此处传入的SocketServer不允许为空,否则触发断言;此处传入布尔值false,告知MQ的构造函数“DoInit()方法你就不要调用了,我会在外面调用的”。
2) 调用DoInit(),该方法应该在Thread构造中调用,而非在MQ的构造中调用,为什么要这么做?该方法源码如下:我们会发现该方法将MQ的初始化标志置为true,并且将自身纳入MQ管理类的管理列表中。如果DoInit在MQ构造中调用,意味着MQ构造后,Thread对象的指针已经暴露于外(被MQ管理类对象持有),此时Thread对象并未完全构建完成,其虚表vtable还未完全建立。这势必会导致Thread的对象还未构造完成时,就可能会被外部使用(在别的线程中通过MessageQueueManager访问该对象)的风险。为了规避这样的竞太条件,因此,需要给MQ的构造传入false,并在Thread构造中调用DoInit()。
void MessageQueue::DoInit() {
if (fInitialized_) {
return;
}
fInitialized_ = true;
MessageQueueManager::Add(this);
}
3)调用SetName()方法为Thread对象命名。源码如下,需要明白的一点是,该方法的执行必须在线程启动之前,否则会触发断言。并且,由于是在线程启动之前执行,该方法仅仅是给用户层的Thread对象成员name_赋值而已,系统内核中线程相关的结构体还未建立,因此,也就无法将该名称设置到内核。只有当线程启动后,才能进一步的将name_设置到线程的内核结构体中去。一般默认名称形如"Thread 0x04EFF758"。
bool Thread::SetName(const std::string& name, const void* obj) {
RTC_DCHECK(!IsRunning());
name_ = name;
if (obj) {
// The %p specifier typically produce at most 16 hex digits, possibly with a
// 0x prefix. But format is implementation defined, so add some margin.
char buf[30];
snprintf(buf, sizeof(buf), " 0x%p", obj);
name_ += buf;
}
return true;
}
两个静态Create*方法来创建Thread对象。
- Thread::Create():给Thread构造传入的是NullSocketServer对象,该对象不持有真正的Socket,使得创建的Thread无法处理网络IO,但可以运行消息循环,可以处理线程间消息投递。WebRTC中工作线程workerthread默认使用该方法创建;
- Thread::CreateWithSocketServer():给Thread构造传入PhysicalSocketServer对象,该对象持有平台相关的Socket对象,使得Thread能处理网络IO,当然,也可以处理线程间消息投递。WebRTC中网络线程networkthread默认使用该方法创建。
std::unique_ptr<Thread> Thread::CreateWithSocketServer() {
return std::unique_ptr<Thread>(new Thread(SocketServer::CreateDefault()));
}
std::unique_ptr<Thread> Thread::Create() {
return std::unique_ptr<Thread>(
new Thread(std::unique_ptr<SocketServer>(new NullSocketServer())));
}
线程的启动
线程启动相关的API为Start(),IsRunnning(),PreRun(),结构体ThreadInit,类Runable,平台相关的线程启动函数CreateThread()以及pthread_create()。
- Start() 方法是WebRTC中线程启动的标准方法,算法流程如下:断言,判断线程是否已经启动-->复位底层消息循环停止标志位-->确保ThreadManager对象的创建-->赋值结构体ThreadInit->平台相关的线程启动。
bool Thread::Start(Runnable* runnable) {
// 测试环境下的断言,当前线程必须处于非运行状态,否则触发Fatal Error
RTC_DCHECK(!IsRunning());
// 如果线程处于运行状态则Start返回false
if (IsRunning())
return false;
// 复位消息循环stop标志位
Restart(); // reset IsQuitting() if the thread is being restarted
// Make sure that ThreadManager is created on the main thread before
// we start a new thread.
// 确保ThreadManager在主线程中构建
ThreadManager::Instance();
// 线程对象Thread不是Wrap而来
owned_ = true;
// 赋值结构体ThreadInit
ThreadInit* init = new ThreadInit;
init->thread = this;
init->runnable = runnable;
// 平台相关代码,Windows系统下启动线程,使用CreateThread API
#if defined(WEBRTC_WIN)
thread_ = CreateThread(nullptr, 0, PreRun, init, 0, &thread_id_);
if (!thread_) {
return false;
}
// 类Unix系统下启动线程,使用pthread库
#elif defined(WEBRTC_POSIX)
pthread_attr_t attr;
pthread_attr_init(&attr);
int error_code = pthread_create(&thread_, &attr, PreRun, init);
if (0 != error_code) {
RTC_LOG(LS_ERROR) << "Unable to create pthread, error " << error_code;
thread_ = 0;
return false;
}
RTC_DCHECK(thread_);
#endif
return true;
}
- RTC_DCHECK 宏在debug模式下,被定义为RTC_CHECK,起到断言的作用(具体会专门写一篇文章来分析WebRTC中的断言);在非debug模式下,
RTC_DCHECK被定义为RTC_EAT_STREAM_PARAMETERS,不论condition(ignored)是true or false,该宏定义的最后两行断言代码都不会被执行,而宏定义的第二行(true ? true : ((void)(ignored), true))是为了不让编译器报ignored未被使用的警告。
// The RTC_DCHECK macro is equivalent to RTC_CHECK except that it only generates
// code in debug builds. It does reference the condition parameter in all cases,
// though, so callers won't risk getting warnings about unused variables.
#if RTC_DCHECK_IS_ON
#define RTC_DCHECK(condition) RTC_CHECK(condition)
#else
#define RTC_DCHECK(condition) RTC_EAT_STREAM_PARAMETERS(condition)
#endif
#define RTC_EAT_STREAM_PARAMETERS(ignored) \
(true ? true : ((void)(ignored), true)) \
? static_cast<void>(0) \
: rtc::webrtc_checks_impl::FatalLogCall<false>("", 0, "") & \
rtc::webrtc_checks_impl::LogStreamer<>()
- IsRunning() 代码如下。在Thread类声明中,Windows环境下有两个值来表征线程,句柄类型的
HWND thread_被初始化为nullptr,整数类型的DWORD thread_id_被初始化为0; 类Unix系统中只有pthread_t thread_一个变量来表征线程,初始化为0。判断线程是否为Running状态,只要判断thread_是否为有效值即可,因为在Start()方法中启动线程时,会调用平台相关的方法给该参数赋有效值。
bool Thread::IsRunning() {
#if defined(WEBRTC_WIN)
return thread_ != nullptr;
#elif defined(WEBRTC_POSIX)
return thread_ != 0;
#endif
}
- Restart() 是父类MQ的方法, 作用是原子操作将stop_置为0,表征该MQ未停止。
void MessageQueue::Restart() {
AtomicOps::ReleaseStore(&stop_, 0);
}
- 初始化ThreadManager 此处即调用ThreadManager::instance()方法,确保ThreadManager在主线程中初始化。另外
owned_设置为true,表征Thread对象是常规的Start()方法启用的,而非Wrap而来。 - ThreadInit 结构体用于平台相关的启动线程函数的入参,定义如下:
struct ThreadInit {
Thread* thread;
Runnable* runnable;
};
其中Runnable用来承载用户需要执行的代码,用于继承Runnable并实现Run方法即可。
class Runnable {
public:
virtual ~Runnable() {}
virtual void Run(Thread* thread) = 0;
protected:
Runnable() {}
private:
RTC_DISALLOW_COPY_AND_ASSIGN(Runnable);
};
- 启动线程:
在Windows上调用CreateThread API来启动线程,当该方法执行成功时,将返回线程的句柄给thread_,线程的id给thread_id_,并在该线程上执行PreRun()方法,init为上述ThreadInit对象,其作为入参传递给PreRun()方法。
#if defined(WEBRTC_WIN)
thread_ = CreateThread(nullptr, 0, PreRun, init, 0, &thread_id_);
if (!thread_) {
return false;
}
在类Unix系统上,使用pthread库的pthread_create()API来启用线程,方法执行成功对pthread thread_的成员赋值,类似的将在新线程上执行PreRun()方法,并将ThreadInit结构的对象init作为其入参传入。
#elif defined(WEBRTC_POSIX)
pthread_attr_t attr;
pthread_attr_init(&attr);
int error_code = pthread_create(&thread_, &attr, PreRun, init);
if (0 != error_code) {
RTC_LOG(LS_ERROR) << "Unable to create pthread, error " << error_code;
thread_ = 0;
return false;
}
RTC_DCHECK(thread_);
#endif
PreRun() 方法是在新启用的线程上执行的代码,不同平台下该函数声明上略有差别,实质上入参是相同的ThreadInit对象。本函数是本文最重要的地方,涉及到了ThreadManager管理Thread类的秘密,涉及到了用户代码如何在新线程上被执行,线程内部的消息循环是如何被运行起来的。
函数内部的执行逻辑写在代码注释上,特殊需要拆解的地方后续说明,源码如下:
#if defined(WEBRTC_WIN)
DWORD WINAPI Thread::PreRun(LPVOID pv) {
#else
void* Thread::PreRun(void* pv) {
#endif
// 如前文所述,ThreadInit作为入参传给PreRun方法。
ThreadInit* init = static_cast<ThreadInit*>(pv);
// 将新创建的Thread对象纳入管理,与当前线程进行绑定。
ThreadManager::Instance()->SetCurrentThread(init->thread);
// 为线程设置名称,该方法会调用平台相关的API给线程内核结构体赋值上该线程的名称。
rtc::SetCurrentThreadName(init->thread->name_.c_str());
// 如果是MAC系统,通过pool对象的创建和析构来使用oc的自动释放池技术,进行内存回收。
#if defined(WEBRTC_MAC)
ScopedAutoReleasePool pool;
#endif
// 如果用户需要执行自己的代码,那么就会继承Runnable并实现Run方法,此时,正是执行
// 用户代码的时刻;否则,将执行Thread的默认Run方法。
if (init->runnable) {
init->runnable->Run(init->thread);
} else {
init->thread->Run();
}
// 到此,线程主要的活儿已干完,以下做清理工作
// 将线程对象与当前线程解绑
ThreadManager::Instance()->SetCurrentThread(nullptr);
// 释放ThreadInit对象
delete init;
// 返回,记得pool局部对象的释放会触发MAC系统下的自动释放池进行内存回收。
#ifdef WEBRTC_WIN
return 0;
#else
return nullptr;
#endif
}
上述代码需要特殊关注点在于:
1)新线程上PreRun()方法执行起来后,ThreadManager立马将当前线程与该Thread对象关联起来,纳入管理之中,当PreRun()方法要执行完毕了,又将当前线程与Thread对象解绑,毕竟该方法退出后,线程就会停止。
2)为当前线程设置名称:前文已经知道在Thread对象构造时,会给Thread的命名字段name_赋值形如"Thread 0x04EFF758"的名称,但并未调用系统相关的API给线程内核对象相关的字段赋值,因为那个时候线程还未启动,线程在系统内核中还没有相应的对象存在呢。此时,需要做这个工作。如下就是rtc::SetCurrentThreadName(init->thread->name_.c_str())方法的源码:
void SetCurrentThreadName(const char* name) {
#if defined(WEBRTC_WIN)
struct {
DWORD dwType;
LPCSTR szName;
DWORD dwThreadID;
DWORD dwFlags;
} threadname_info = {0x1000, name, static_cast<DWORD>(-1), 0};
__try {
::RaiseException(0x406D1388, 0, sizeof(threadname_info) / sizeof(DWORD),
reinterpret_cast<ULONG_PTR*>(&threadname_info));
} __except (EXCEPTION_EXECUTE_HANDLER) { // NOLINT
}
#elif defined(WEBRTC_LINUX) || defined(WEBRTC_ANDROID)
prctl(PR_SET_NAME, reinterpret_cast<unsigned long>(name)); // NOLINT
#elif defined(WEBRTC_MAC) || defined(WEBRTC_IOS)
pthread_setname_np(name);
#endif
}
3)作为Mac系统上的特例,使用了objc的自动释放池技术来管理内存,实际上就是通过局部变量ScopedAutoReleasePool pool的构造以及PreRun函数结束时该对象的析构来调用objc的objc_autoreleasePoolPush()和objc_autoreleasePoolPop()进行内存释放。至于其原理嘛,可以看此篇博客:自动释放池的前世今生 ---- 深入解析Autoreleasepool
#if defined(WEBRTC_MAC)
#include "rtc_base/system/cocoa_threading.h"
extern "C" {
void* objc_autoreleasePoolPush(void);
void objc_autoreleasePoolPop(void* pool);
}
class ScopedAutoReleasePool {
public:
ScopedAutoReleasePool() : pool_(objc_autoreleasePoolPush()) {}
~ScopedAutoReleasePool() { objc_autoreleasePoolPop(pool_); }
private:
void* const pool_;
};
#endif
4)如果用户并不想执行自己的代码,即不给Start方法传入Runnabel对象,那么Thread对象提供了默认的Run()方法在新线程上执行,该方法源码如下。本文不展开去叙述ProcessMessages(kForever)是如何运作的,因为这属于消息循环的内容,会在下一篇文章中分析,此处只要知道,如果用户不运行自己的代码干自己的活,那么默认的方式就是启动了一个消息循环不停地在此执行。
void Thread::Run() {
ProcessMessages(kForever);
}
bool Thread::ProcessMessages(int cmsLoop) {
// Using ProcessMessages with a custom clock for testing and a time greater
// than 0 doesn't work, since it's not guaranteed to advance the custom
// clock's time, and may get stuck in an infinite loop.
RTC_DCHECK(GetClockForTesting() == nullptr || cmsLoop == 0 ||
cmsLoop == kForever);
int64_t msEnd = (kForever == cmsLoop) ? 0 : TimeAfter(cmsLoop);
int cmsNext = cmsLoop;
while (true) {
#if defined(WEBRTC_MAC)
ScopedAutoReleasePool pool;
#endif
Message msg;
if (!Get(&msg, cmsNext))
return !IsQuitting();
Dispatch(&msg);
if (cmsLoop != kForever) {
cmsNext = static_cast<int>(TimeUntil(msEnd));
if (cmsNext < 0)
return true;
}
}
}
线程的终止
停止一个线程,可以通过调用线程的Thread.Stop()方法来实施,但千万不能在当前线程上调用该方法来终止自己。MQ的Quit()方法会在介绍消息循环时来详细解释,此处作用就是停止线程消息循环。Join()方法在后面介绍,此处作用是阻塞地等待目标线程终止,因此,Stop函数一般会阻塞当前线程。
void Thread::Stop() {
MessageQueue::Quit();
Join();
}
线程的sleep,join以及阻塞权限
Thread类中bool blocking_calls_allowed_字段控制着在该线程是否可以运行阻塞,等待操作,比如静态方法SleepMs,线程的Join。
-SleepMs() 方法提供了线程休眠功能,方法中先对当前线程是否允许阻塞进行断言,然后在Windows上调用Windows API Sleep()方法对当前线程休眠,类Unix系统上使用nanosleep()系统调用进行休眠。
bool Thread::SleepMs(int milliseconds) {
// 断言当前线程是否允许阻塞
AssertBlockingIsAllowedOnCurrentThread();
//调用不同平台下的线程休眠函数进行休眠
#if defined(WEBRTC_WIN)
::Sleep(milliseconds);
return true;
#else
// POSIX has both a usleep() and a nanosleep(), but the former is deprecated,
// so we use nanosleep() even though it has greater precision than necessary.
struct timespec ts;
ts.tv_sec = milliseconds / 1000;
ts.tv_nsec = (milliseconds % 1000) * 1000000;
int ret = nanosleep(&ts, nullptr);
if (ret != 0) {
RTC_LOG_ERR(LS_WARNING) << "nanosleep() returning early";
return false;
}
return true;
#endif
}
此处我们看一下这个是否允许阻塞的函数实现,该方法由NDEBUG宏来控制,意味着在debug模式下才会起作用,而非debug模式下,该函数什么也不做。在debug模式,如果当前线程关联了Thread对象,并且其Thread.blocking_calls_allowed_字段设置为false,表示不允许该线程阻塞的情况下,就会触发断言。即在此Thread所关联的线程中调用SleepMs()方法会触发断言,从而终止程序的运行。
// static
void Thread::AssertBlockingIsAllowedOnCurrentThread() {
#if !defined(NDEBUG)
Thread* current = Thread::Current();
RTC_DCHECK(!current || current->blocking_calls_allowed_);
#endif
}
另外,Thread也提供了一个可以设置blocking_calls_allowed_字段的方法SetAllowBlockingCalls()
bool Thread::SetAllowBlockingCalls(bool allow) {
RTC_DCHECK(IsCurrent());
bool previous = blocking_calls_allowed_;
blocking_calls_allowed_ = allow;
return previous;
}
- Join()
该方法用于某个线程中等待另外一个Thread所表征的线程停止。算法流程如源码注释:
void Thread::Join() {
// 判断等待的线程对象Thread所表征的线程是否已经停止,若已停止了,那么就不需要等待了,直接返回吧
if (!IsRunning())
return;
// 断言是否是在当前线程调用自己的Join造成自己等待自己
RTC_DCHECK(!IsCurrent());
// 判断当前线程是否具有阻塞权限,如无,则打印警告,但是并没有进行断言
if (Current() && !Current()->blocking_calls_allowed_) {
RTC_LOG(LS_WARNING) << "Waiting for the thread to join, "
<< "but blocking calls have been disallowed";
}
// 平台相关的实现
// Windows平台下调用WaitForSingleObject() API进行等待
#if defined(WEBRTC_WIN)
RTC_DCHECK(thread_ != nullptr);
// 等待目标线程终止
WaitForSingleObject(thread_, INFINITE);
// 关闭线程句柄
CloseHandle(thread_);
// 成员复位
thread_ = nullptr;
thread_id_ = 0;
// 类Unix系统下调用pthread库的pthread_join()方法进行等待
#elif defined(WEBRTC_POSIX)
// 等待目标线程终止
pthread_join(thread_, nullptr);
// 成员复位
thread_ = 0;
#endif
}
获取当前线程对象 && 判断是否是当前线程
获取当前线程Thread对象的方式直接复用了ThreadManager的CurrentThread()方法,若当前线程没有关联相关的Thread对象,那么返回空指针,若当前线程是创建ThreadManager对象的线程,也即主线程,那么如果主线程没有关联Thread对象,且没有定义NO_MAIN_THREAD_WRAPPING,则会给主线程Wrap一个Thread对象。
Thread* Thread::Current() {
ThreadManager* manager = ThreadManager::Instance();
Thread* thread = manager->CurrentThread();
#ifndef NO_MAIN_THREAD_WRAPPING
// Only autowrap the thread which instantiated the ThreadManager.
if (!thread && manager->IsMainThread()) {
thread = new Thread(SocketServer::CreateDefault());
thread->WrapCurrentWithThreadManager(manager, true);
}
#endif
return thread;
}
判断Thread对象是否是当前线程关联的Thread,也很简单,源码如下:
bool Thread::IsCurrent() const {
return ThreadManager::Instance()->CurrentThread() == this;
}
线程的Wrap
Thread中Wrap相关的API有4个,如下源码所示。在WebRTC源码分析-线程基础之线程管理一文中已经解析过Wrap相关的函数,此处不再展开表述。Wrap函数主要用于如下情形:线程启动不是由标准的WebRTC启动方式实施,即不是通过调用Thread.Start()方法启动。那么,此刻线程没有与一个Thread对象相关联,那么Wrap就是干这个事,将一个线程与一个Thread对象关联起来。具体而言,有如下3件事需要做:
- 获取当前线程的句柄,并赋值给Thread.thread_成员;
- 将Thread.owned_成员设置为false,表示该线程对象是Wrap而来;
- 将Thread对象与当前线程关联起来,纳入ThreadManager的管理之中。
bool WrapCurrent();
void UnwrapCurrent();
void SafeWrapCurrent();
bool WrapCurrentWithThreadManager(ThreadManager* thread_manager,
bool need_synchronize_access);
总结
本文阐述了rtc::Thread类所提供的基础线程功能,分别从Thread对象的创建,新线程的启动与终止,线程阻塞权限以及线程阻塞相关的函数SleepMs、Join,获取当前线程、如何判断代码是否在当前线程中执行,线程的Wrap等几个方面进行了分析。以下是需要再重点回顾的几个点:
- Thread类中线程相关的功能是在封装了平台相关API的基础上实现的,在Windows系统上是通过Windows API提供,在类Unix系统上是通过pthread库提供。比如Win上创建线程CreateThread(),类Unix上相应为
pthread_create();Win上休眠Sleep(),类Unix上是nanosleep()系统调用,非pthread库功能;Win上线程join使用WaitForSingleObject(),类Unix上使用pthread库的pthread_join(); - Thread对象的构造时有个需要注意的点,那就是DoInit()方法需要Thread构造函数中被调用,否则会引发竞太条件。
- Thread.Start()方法以及Thread.PreRun()方法是本文重点,是WebRTC中启动线程的标准流程。
- Thread类提供了线程是否允许阻塞的权限设置,由成员
Thread.blocking_calls_allowed_来控制,Thread中引发线程阻塞的函数,如SleepMs,Join,Send等都会先进行权限检查,要么打印警告日志,要么触发断言。 - Thread类的Wrap函数族提供了非标准方式启动的线程纳入ThreadManager管理的额外方式。