Mediasoup1
原文出处:Mediasoup库的架构(C++部分)
Mediasoup库介绍
Mediasoup基本概念
Worker:代表一个结点,下图的每一块就是一个Worker。假设操作系统是双核的,每一核都会创建一个进程,这个进程就是一个Worker
Router:房间或路由器
Producer:生产者
Consumer:消费者
Transport:客户端与服务端的一条连接线,这条线上可以有多个消费者和生产者

Mediasoup包括的特性
- 支持IPv6
- ICE/DTLS/RTP/RTCP over UDP and TCP
- 支持 Simulcast 和 SVC
- 支持拥塞控制
- 带宽评估
- 支持STCP协议
- 多流使用同一个ICE+DTLS传输通道
- 底层采用进程+libuv,异步I/O的处理方式
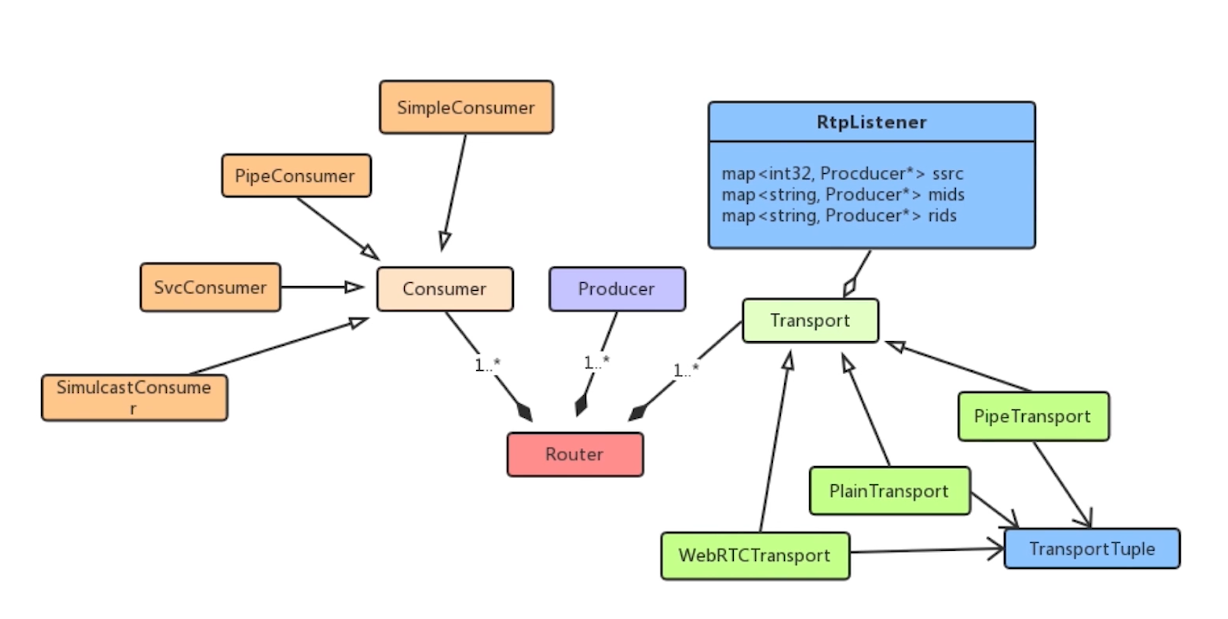
Mediasoup C++核心类图
Consumer
SimpleConsumer:普通的RTP数据消费者,对于音频和视频都一样,都是最简单的消费者
PipeConsumer:Pipe是用作于不同的Worker与Worker之间进行数据的流转,所以PipeConsumer就是用来接受不同的Worker传输过来的数据
SvcConsumer:SVC按照分层的方式分为核心层、扩展层、边缘层,这个类的作用就是用来传输不同层的数据的
SimulcastConsumer:当共享者传输多路流的时候,使用的是Simulcast,对于接收者来说,也要使用Simulcast进行消费
Transport
- WebRTCTransport:主要用于浏览器之间或与其他终端之间的通信,这种数据一般都是加密的,为了保证数据不被窃取掉,它有很多的安全机制,且非常复杂
- PlainRTPTransport:主要用于普通的非加密的RTP数据的传输
- PipeTransport:用于不同Worker/Router之间的传输
Router
对于Router来说,一个Router对应了多个Consumer、多个Producer、多个Transport,所以它是1对多的关系
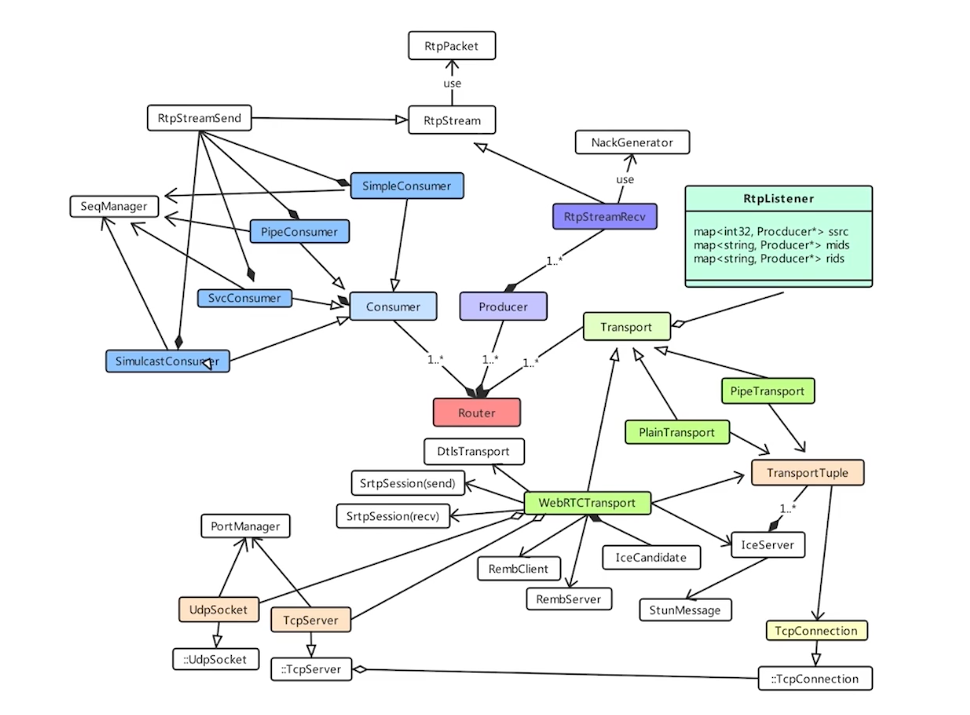
Mediasoup C++详细类图
RtpStreamSend
可能会有人疑惑,消费者为什么会发送数据呢,不应该是接收数据吗?其实这里需要想通一点,Mediasoup是作为流媒体服务器,真正的消费者是客户端,所以服务器的Consumer需要把数据发送给客户端
RtpStreamSend继承自RtpStream,这个类处理Rtp数据流的收发。RtpStream使用到了RtpPacket,这个包是用于对Rtp数据包的分析,Rtp数据有数据包头,对于包头每一个字段的定义都是在这个Packet里面操作的
SeqManager
服务端推送给客户端的数据流是会重新排序的,排序的时候便会依靠这个SeqManager,它会记录某个SSRC所对应的Sequence,以此为起始位置,然后后面 的每个包都向下递增一个数
Producer
Producer作为服务端的生产者,它是用来接收共享者发送的数据流,所以它里面包含多个RtpStreamRecv,是一对多的关系(为什么是多个RtpStreamRecv呢?因为数据的接收有可能会丢包,丢包重传的也算作一路流,对应的音频的丢包也是需要重传)
NackGenerator
作为数据的接收端,RtpStreamRecv使用到了NackGenerator丢包产生器
接收端能够知道有没有丢包,因为数据包有Sequence,比如发送了100个数据,前50个数据是连续的,但假设当50之后是55,Recv端就知道丢了51、52、53、54 这4个包了。丢包之后如何解决呢,有两种方式:
- Fec:在每个包增加一些冗余,它能计算 出丢失的音频包或视频包
- Nack:它会告诉发送端丢了哪些包,发送端会根据策略,若时间比较短的话,会把丢失的包补上来,具体补哪些包就是根据NackGenerator产生的
PortManager
端口管理器,对于Mediasoup来说,默认是从40000到49999共一万个端口号。UdpSocket和TcpServer通过PortManager进行对端口号的管理,首先确定端口号有没有被占用,没有被占用就使用该端口号对数据传输;若被占用,就根据PortManager的策略往后跳。注意Udp和Tcp的使用是互斥的
DtlsTransport
使用tls对Rtp包进行数据加密的协议,同时在这里面还使用到了Srtp协议,Srtp协议分为数据的收与发,所以在WebRTCTransport中有Srtp send和recv这两个Session
RembClient/RembServer
这两个主要用于对带宽的评估,既可用于client端也可用于server端。对于共享者来说,Mediasoup的WebRTCTransport就是RembClient端;对于消费者来说,就是RembServer端
IceCandidate
候选者包括Host、Server reflexive、Relay reflexive三种,对于WebRTC一般设置成Host,最高优先级
IceServer
包括证书验证、指纹识别等一系列安全验证机制,它里面也包含了多个TransportTuple
TransportTuple
如果使用TCP连接,它里面便含有TcpConnection
原文出处:Mediasoup主业务流程+时序图
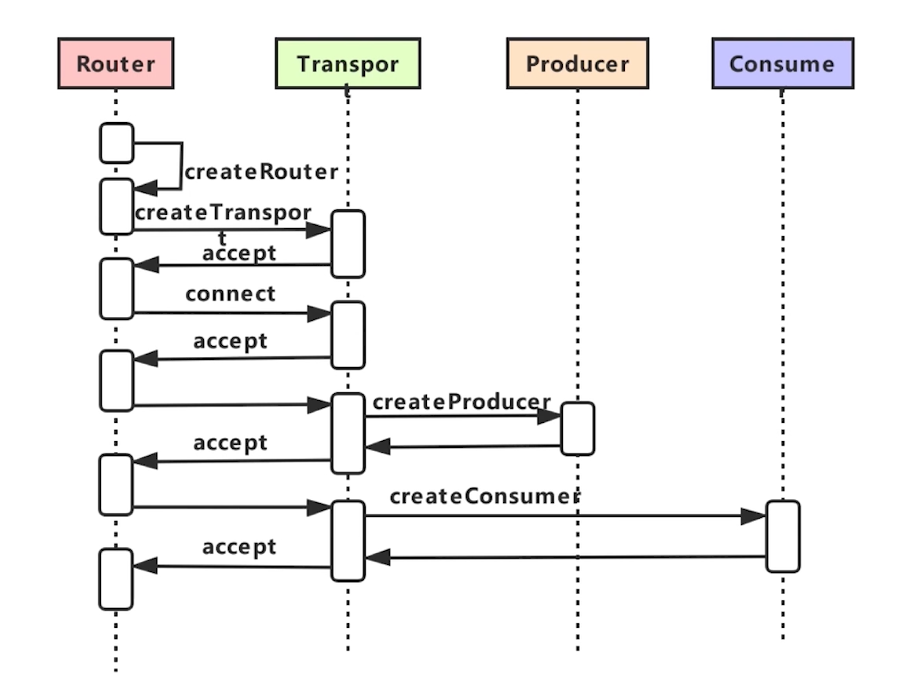
- createRouter
- createTransport
- connect
- createProducer
- createConsumer
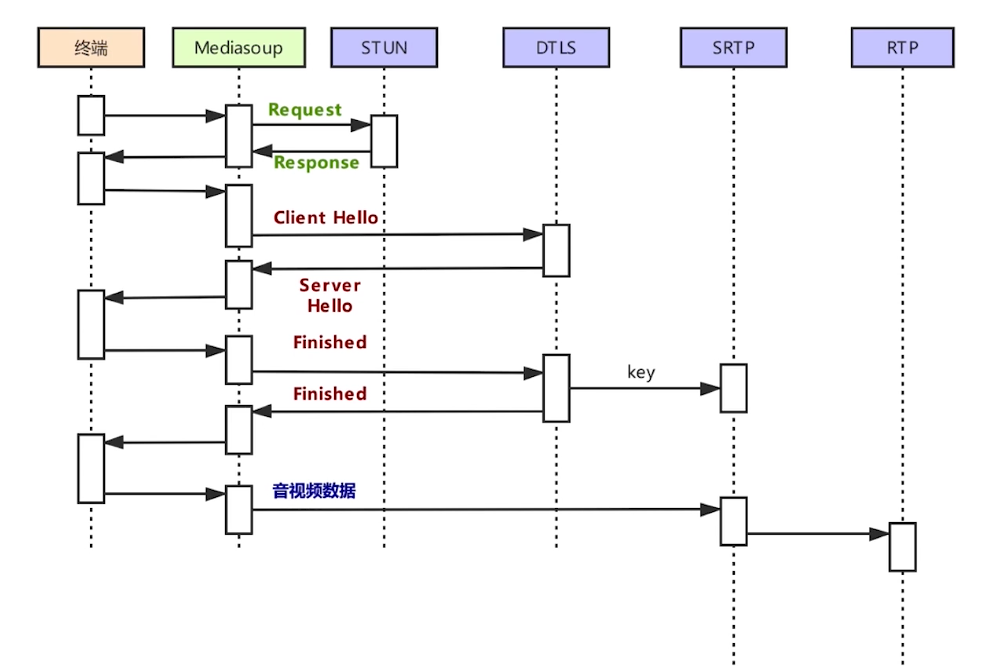
connect的细节:
时序图
原文出处:mediasoup 3.9.10 worker 源码初步梳理
一、概述
Mediasoup 主要提供了 3 个库和 1 个 demo。
| 库名 | 说明 |
|---|---|
| mediasoup | 主要包含三部分。一是 worker 可执行程序,由 C++ 实现,是本系列分析的重点;二是 Node 库,由 TypeScript 实现;三是 Rust 库,和 Node 的主要不同在于它没有以进程方式而是以静态库方式使用 mediasoup-worker。 |
| mediasoup-client | Web 客户端库。TypeScript 实现。 |
| libmediasoupclient | Native 客户端库。C++ 实现。 |
| mediasoup-demo | 官方 Demo。 |
| Examples | 各种示例。 |
网络上对 mediasoup 的 Node.js 层——准确说是对官方的 mediasoup-demo 的源码分析比较多,对于mediasoup-client 和 mediasoup-worker (之后简 worker) 等的源码详细分析相对较少。本人之前有将GB28281 集成进 mediasoup 的想法并验证了可行性,以及使用 .Net 重新实现过 Node.js 层(含 mediasoup-client 和 mediasoup-demo),对 worker 的源码进行过比较粗略地浏览。最近基于想要弥补一些比较模糊的认知,并且 mediaoup本身也在进化,故就再做了一次源码的梳理。
至于 mediasoup 是什么、能做什么、与其他 SFU 相较而言的优缺点、Demo 如何运行、为什么不用单一语言来实现等等讨论不是本系列关注的重点。
二、名词/概念
mediasoup 定义和抽象了一些名词和概念,为了方便描述,做整理如下表:
| 名词/概念 | 说明 |
|---|---|
| Settings | 设置。用于读取命令行配置、将配置输出到日志,以及运行时更新配置。另外用 线程本地存储 保存配置以确保每个线程都有一个 Settings 配置对象。当然,以 worker 进程方式运行不存在这个问题。设置的选项(option: getopt.h)具体包括:logLevel、logTags、rtcMinPort 和 rtcMaxPort、dtlsCertificateFile 和 dtlsPrivateKeyFile 这六项,分别表示日志等级、日志标签(如ice、dtls等,控制哪些类的日志才会传出)、最小和最大 rtc 端口,以及 dtls 证书文件和私钥的物理路径。这些参数都是可选的,如果未提供则会使用默认值或自动生成。 |
| Logger | 日志。有 debug、warn、error 和 none 四个等级。日志通过 ChannelSocket 传输到父进程,如果 ChannelSocket 尚未创建则会在标准输出中打印日志。mediasoup 给很多方法都加了 Trace 日志,打开 MS_LOG_TRACE 编译宏开关并且设置日志等级为 debug 则会输出。类似于 Settings,Logger 也用线程本地存储保存 Buffer 和 ChannelSocket 以确保每个线程都有一个对象。 |
| ChannelSocket | 通道 Socket。抽象了 worker 进程和父进程的通信。得益于 libuv,对于进程间通信开发者不用关心操作系统是用的 Linux/UNIX 的 UNIX Domain Socket 还是 Windows 的 IPC 等。而 mediasoup 的这层 ChannelSocket 抽象,也为后来支持的 以库的方式使用 worker 打下基础。ChannelSocket 是双向的,主要向父进程传输日志;接受父进程的如创建 Transport、Producer 等指令请求;向父进程传输指令请求的执行结果;向父进程传输 Producer 暂停关闭、SCTP 发送 Buffer 已满之类的通知。所有消息都是基于文本的。 |
| PayloadChannelSocket | 负载通道 Socket。类似于 ChannelSocket,不同的是 PayloadChannelSocket 用于 DirectTransport 向父进程发送 RTP 或 RTCP 数据包等。消息是基于文本和二进制的。 |
| Worker | 工作者。注意这里并非指 worker 进程,但某种意义下可以指代 worker 进程。ChannelSocket 和 PayloadChannelSocket 只负责消息的接收和发送,而 Worker 是具体消息的处理入口。它根据消息的类别进行处理,对于自身可以负责的请求比如获取资源使用率、创建及关闭 Router、dump 获取本 Worker 下的 Router 的 Id 集合等则直接处理,其余的就交给 Router 来处理。遵循谁创建谁销毁的原则,Router 的销毁工作也由 Worker 负责。 |
| Router | 路由。Router 是比较重要的概念,不准确地说可以将 Router 和房间对应起来。其保存了 Transport、Producer、Consumer、Producer下对应的 Consumer 以及 DataProducer 和 DataConsumer 相关的集合。如上文所述,Worker 将其处理不了的工作交给 Router,Router 能够处创建和关闭 Transport 以及和 RtpObserver 相关的几个操作请求,其余的就交给 Transport 处理。另外,Router 只负责 Transport 和 RtpObserver 的销毁工作,对于 Producer、Consumer 等则由创建这些对象的 Transport 负责。 |
| Transport | 传输通道。Transport 是抽象类,具体类包括:WebRtcTransport、PlainTransport、DirectTransport 和 PipeTransport。 |
| WebRtcTransport | WebRtc 传输通道。WebRtcTransport 包含 Socket 服务端,将接收到的数据包尝试转换为 StunPacket、Rtcp Packet、RtpPacket 或 Dtls 数据 中的一种。StunPacket 由 IceServer 处理,Rtcp Packet 会经过处理后发送给 Consumer, RtpPacket 由相应的 Producer 处理,Dtls 数据当然是先解密再处理;也会通过 Sokcet 将数据发送到本 Transport 下对应的 Consumer 中去。 |
| PlainTransport | Plain 传输通道。类似于 WebRtcTransport,不同的是不会收到 StunPacket 。 |
| PipeTransport | Pipe 传输通道。用于跨 Router/worker Rtp 包传输。 |
| DirectTransport | Direct 传输通道。DirectTransport 不包含 Socket 服务端,将接收到的数据直接通过 PayloadChannel 发送给 Consumer。 |
| Producer | 生产者。类型有四类:SIMPLE、SIMULCAST、SVC 和 PIPE。 |
| Consumer | 消费者。Consumer 是抽象类,具体类包括:SimpleConsumer、SimulcastConsumer、SvcConsumer 和 PipeConsumer。如果是 PipeTranspor 进行消费,则 type 为 “pipe”,否则为 Producer 的 type。 |
| SimpleConsumer | 单体消费者。 |
| SimulcastConsumer | Simulcast消费者。 |
| SvcConsumer | Svc 消费者。 |
| PipeConsumer | Pipe 消费者。 |
| DataProducer | Data 生产者。类型有两类:SCTP 和 DIRECT。只有传递 enableSctp 为 true 的参数才能创建类型为 SCTP 的 DataProducer;只能在 DirectTransport 之上创建类型为 DIRECT 的 DataProducer。 |
| DataConsumer | Data 消费者。只有传递 enableSctp 为 true 的参数才能创建类型为 SCTP 的 DataProducer;只能在 DirectTransport 之上创建类型为 DIRECT 的 DataConsumer。 |
| RtpObserver | Rtp 观察者。RtpObserver 是抽象类,具体类包括:AudioLevelObserver 和 ActiveSpeakerObserver。 |
| AudioLevelObserver | 音量观察者。收到音频 Rtp 包后累计音量。比如每1秒间隔计算触发一次计算,如果对应 Producer 收集了 10 个及以上的包则计算音频的平均值,如果值大于默认 -80dB 则将 Producder 的 Id 收集起来,最多收集指定参数 maxEntries 那么多个。如果存在符合条件的 Producer 则发出 volumes 事件,否则发出 silence 事件。事件会发送给父进程,而父进程会发送给相应的客户端。 |
| ActiveSpeakerObserver | 说话人观察者。ActiveSpeakerObserver 是 3.8.0 新增的。具体算法不算太简单,大致看并不是谁说话就算,而是计算出会议中说话人中谁是主导者。如果存在符合条件的唯一 Producer 则发出 dominantspeaker 事件。事件会发送给父进程,而父进程会发送给相应的客户端。 |
父对象通常会监听子对象的相关事件,比如 Worker 会监听 ChannelSocket 和 PayloadChannelSocket 的相关事件(Router没有监听器),Router 会监听 Transport 的相关事件, Transport 会监听 Producer 、Consumer 等的相关事件。
如果要扩展其他协议,比如支持 GB28181 的 PS 流,可以创建自定义 Transport 。
如果要集成一些 AI 功能,比如目标识别,手势识别,语音指令识别等,可以创建自定义 RtpObserver 。
三、ChannelSocket 消息类型
ChannelRequest::MethodId 枚举定义了各种消息。其命名有一定规律,除 *.close 和 RtpObServer相关的消息外,第一个下划线前的第一个单词通常标明了消息由谁来处理。比如 TRANSPORT_PRODUCE,表示 Transport 需要处理 Produce 消息。
// File: worker/src/Channel/ChannelRequest.cpp
absl::flat_hash_map<std::string, ChannelRequest::MethodId> ChannelRequest::string2MethodId =
{
// 关闭 Worker 。通常发生在 worker 进程被关闭时,由 Worker 的析构函数触发。
{ "worker.close", ChannelRequest::MethodId::WORKER_CLOSE },
// 获取 Worker 转储。返回值包含 worker 进程 Id 和本 Worker 下的 Router 的 routerIds 集合。
{ "worker.dump", ChannelRequest::MethodId::WORKER_DUMP },
// 获取 Worker 资源使用率。结构见 http://docs.libuv.org/en/v1.x/misc.html#c.uv_rusage_t 或 mediasoup-client 库。
{ "worker.getResourceUsage", ChannelRequest::MethodId::WORKER_GET_RESOURCE_USAGE },
// 更新设置。具体是更新日志等级(logLevel)和日志标签(logTags)。返回值无具体内容。
{ "worker.updateSettings", ChannelRequest::MethodId::WORKER_UPDATE_SETTINGS },
// 创建 Router。请求参数的 routerId 有调用方提供。返回值无具体内容。
{ "worker.createRouter", ChannelRequest::MethodId::WORKER_CREATE_ROUTER },
// 关闭 Router。该消息由 Worker 处理。返回值无具体内容。
{ "router.close", ChannelRequest::MethodId::ROUTER_CLOSE },
// 获取 Router 转储。返回值包含本 Router 的 id、transportIds、rtpObserverIds、mapProducerIdConsumerIds、mapConsumerIdProducerId、mapProducerIdObserverIds、mapDataProducerIdDataConsumerIds 和 mapDataConsumerIdDataProducerId。
{ "router.dump", ChannelRequest::MethodId::ROUTER_DUMP },
// 创建 WebRtcTransport。请求参数主要主要有监听 IP 和 Port(旧版可能无法指定端口而只能使用允许范围内的随机端口);是否启用 UDP 和(或) TCP;是否首选 UDP 和(或) TCP。返回值包含客户端创建 Transport 所需参数,暂略。
{ "router.createWebRtcTransport", ChannelRequest::MethodId::ROUTER_CREATE_WEBRTC_TRANSPORT },
// 创建 PlainTransport。请求参数类似有创建 WebRtcTransport,但无需指定使用 UDP 还是 TCP,因为只支持 UDP。额外的 comedia 表示是否需要预先连接 Transport;rtcpMux 表示是否 RTCP 复用 RTP 端口;enableSrtp 表示是否使用 Srtp,true 则需要提供 srtpCryptoSuite 参数。返回值包含客户端创建 Transport 所需参数,暂略。
{ "router.createPlainTransport", ChannelRequest::MethodId::ROUTER_CREATE_PLAIN_TRANSPORT },
// 创建 PipeTransport。请求参数类似有创建 WebRtcTransport,但无需指定使用 UDP 还是 TCP,因为只支持 UDP。额外的 enableRtx 是否启用 Rtx 重传。返回值包含打通管道所需参数,暂略。
{ "router.createPipeTransport", ChannelRequest::MethodId::ROUTER_CREATE_PIPE_TRANSPORT },
// 创建 DirectTransport。请求参数不能将 enableSctp 设置为 true,因为没必要。也无需提供监听 IP 和 Port 等信息。返回值包含直连需参数,暂略。
{ "router.createDirectTransport", ChannelRequest::MethodId::ROUTER_CREATE_DIRECT_TRANSPORT },
// 创建 ActiveSpeakerObserver。 请求参数必须提供 interval 。返回会议中发言人的音量。
{ "router.createActiveSpeakerObserver", ChannelRequest::MethodId::ROUTER_CREATE_ACTIVE_SPEAKER_OBSERVER },
// 创建 AudioLevelObserver。请求参数必须提供 interval,maxEntries 和 threshold 。返回会议中唯一主导说话者。
{ "router.createAudioLevelObserver", ChannelRequest::MethodId::ROUTER_CREATE_AUDIO_LEVEL_OBSERVER },
// 关闭 Transport。该消息由 Router 处理。Transport 的关闭会触发连锁反应,以确保其上的 Consumer、Producer,其他人消费本 Transport 上的 Producer 的 Consumer(有点绕) 得以关闭。返回值无具体内容。
{ "transport.close", ChannelRequest::MethodId::TRANSPORT_CLOSE },
// 获取 Transport 转储。返回值包含本 Transport 的 Id、是否是 DirectTransport 的 direct 等。更多返回参数详见:Transport.cpp 的 void Transport::FillJson(json& jsonObject) const 方法。
{ "transport.dump", ChannelRequest::MethodId::TRANSPORT_DUMP },
// 获取 Transport 的状态值。返回值见:Transport.cpp 的 void Transport::FillJsonStats(json& jsonArray) 方法。
{ "transport.getStats", ChannelRequest::MethodId::TRANSPORT_GET_STATS },
// 连接 Transport。DirectTransport 不会发送该请求,创建 PipeTransport 时如果参数 comedia 为 true 也无需发送该请求。返回值暂略。
{ "transport.connect", ChannelRequest::MethodId::TRANSPORT_CONNECT },
// 设置最大传入码率。用于拥塞控制。返回值无具体内容。
{ "transport.setMaxIncomingBitrate", ChannelRequest::MethodId::TRANSPORT_SET_MAX_INCOMING_BITRATE },
// 设置最大传出码率。用于拥塞控制。返回值无具体内容。
{ "transport.setMaxOutgoingBitrate", ChannelRequest::MethodId::TRANSPORT_SET_MAX_OUTGOING_BITRATE },
// 重启 ICE。 仅 WebRtcTransport 会发送该请求。
{ "transport.restartIce", ChannelRequest::MethodId::TRANSPORT_RESTART_ICE },
// 创建 Producer。返回值暂略。
{ "transport.produce", ChannelRequest::MethodId::TRANSPORT_PRODUCE },
// 创建 Consumer。返回值暂略。
{ "transport.consume", ChannelRequest::MethodId::TRANSPORT_CONSUME },
// 创建 DataProducer。返回值暂略。
{ "transport.produceData", ChannelRequest::MethodId::TRANSPORT_PRODUCE_DATA },
// 创建 DataConsumer。返回值暂略。
{ "transport.consumeData", ChannelRequest::MethodId::TRANSPORT_CONSUME_DATA },
// 启用 Transport 的跟踪事件。可选事件包括:probation 和 bwe。返回值无具体内容。
{ "transport.enableTraceEvent", ChannelRequest::MethodId::TRANSPORT_ENABLE_TRACE_EVENT },
// 关闭 Producer。该消息由 Transport 处理。Producer 的关闭会触发连锁反应,以确消费本 Producer 的 Consumer 和监听本 Producer 的 RtpObserver 得以关闭。返回值无具体内容。
{ "producer.close", ChannelRequest::MethodId::PRODUCER_CLOSE },
// 获取 Producer 转储。返回值暂略。
{ "producer.dump", ChannelRequest::MethodId::PRODUCER_DUMP },
// 获取 Producer 状态。返回值暂略。
{ "producer.getStats", ChannelRequest::MethodId::PRODUCER_GET_STATS },
// 暂停 Producer 的生产。返回值无具体内容。
{ "producer.pause", ChannelRequest::MethodId::PRODUCER_PAUSE },
// 恢复 Producer 的生产。返回值无具体内容。
{ "producer.resume" , ChannelRequest::MethodId::PRODUCER_RESUME },
// 启用 Producer 的跟踪事件。可选事件包括:rtp、keyframe、nack、pli 和 fir。返回值无具体内容。
{ "producer.enableTraceEvent", ChannelRequest::MethodId::PRODUCER_ENABLE_TRACE_EVENT },
// 关闭 Consumer。该消息由 Transport 处理。返回值无具体内容。
{ "consumer.close", ChannelRequest::MethodId::CONSUMER_CLOSE },
// 获取 Consumer 转储。返回值暂略。
{ "consumer.dump", ChannelRequest::MethodId::CONSUMER_DUMP },
// 获取 Consumer 状态。返回值暂略。
{ "consumer.getStats", ChannelRequest::MethodId::CONSUMER_GET_STATS },
// 暂停 Consumer 的消费。返回值无具体内容。
{ "consumer.pause", ChannelRequest::MethodId::CONSUMER_PAUSE },
// 暂停 Consumer 的消费。返回值无具体内容。
{ "consumer.resume", ChannelRequest::MethodId::CONSUMER_RESUME },
// 设置 Consumer 的首选 Layers。仅对 SimulcastConsumer 和 SvcConsumer 有效。返回值无具体内容。
{ "consumer.setPreferredLayers", ChannelRequest::MethodId::CONSUMER_SET_PREFERRED_LAYERS },
// 设置 Consumer 的码率优先级。返回值无具体内容。
{ "consumer.setPriority", ChannelRequest::MethodId::CONSUMER_SET_PRIORITY },
// Consumer 请求关键帧。返回值无具体内容。
{ "consumer.requestKeyFrame", ChannelRequest::MethodId::CONSUMER_REQUEST_KEY_FRAME },
// 启用 Consumer 的跟踪事件。可选事件包括:rtp、keyframe、nack、pli 和 fir。返回值无具体内容。
{ "consumer.enableTraceEvent", ChannelRequest::MethodId::CONSUMER_ENABLE_TRACE_EVENT },
// 如下 DataProducer 和 DataProducer 的请求类似于 Producer 和 Consumer
{ "dataProducer.close", ChannelRequest::MethodId::DATA_PRODUCER_CLOSE },
{ "dataProducer.dump", ChannelRequest::MethodId::DATA_PRODUCER_DUMP },
{ "dataProducer.getStats", ChannelRequest::MethodId::DATA_PRODUCER_GET_STATS },
{ "dataConsumer.close", ChannelRequest::MethodId::DATA_CONSUMER_CLOSE },
{ "dataConsumer.dump", ChannelRequest::MethodId::DATA_CONSUMER_DUMP },
{ "dataConsumer.getStats", ChannelRequest::MethodId::DATA_CONSUMER_GET_STATS },
// 获取尚未发出的 Sctp buffer 数量。
{ "dataConsumer.getBufferedAmount", ChannelRequest::MethodId::DATA_CONSUMER_GET_BUFFERED_AMOUNT },
// 降低 Sctp buffer 阈值。
{ "dataConsumer.setBufferedAmountLowThreshold", ChannelRequest::MethodId::DATA_CONSUMER_SET_BUFFERED_AMOUNT_LOW_THRESHOLD },
// 关闭 RtpObserver。该消息由 Router 处理。返回值无具体内容。
{ "rtpObserver.close", ChannelRequest::MethodId::RTP_OBSERVER_CLOSE },
// 暂停 RtpObserver 的监听。该消息由 Router 处理。返回值无具体内容。
{ "rtpObserver.pause", ChannelRequest::MethodId::RTP_OBSERVER_PAUSE },
// 恢复 RtpObserver 的监听。该消息由 Router 处理。返回值无具体内容。
{ "rtpObserver.resume", ChannelRequest::MethodId::RTP_OBSERVER_RESUME },
// 向 RtpObserver 新增 Producer。返回值无具体内容。
{ "rtpObserver.addProducer", ChannelRequest::MethodId::RTP_OBSERVER_ADD_PRODUCER },
// 从 RtpObserver 移除 Producer。返回值无具体内容。
{ "rtpObserver.removeProducer", ChannelRequest::MethodId::RTP_OBSERVER_REMOVE_PRODUCER }
};
四、PayloadChannelSocket 消息类型
PayloadChannelRequest::MethodId 枚举定义一种消息。
// File: worker/src/PayloadChannel/PayloadChannelRequest.cpp
absl::flat_hash_map<std::string, PayloadChannelRequest::MethodId> PayloadChannelRequest::string2MethodId =
{
// DataConsumer 发送
{ "dataConsumer.send", PayloadChannelRequest::MethodId::DATA_CONSUMER_SEND },
};
五、ChannelSocket 通知类型
为了方便使用, mediasoup 定义了 ChannelNotifier 类用于 worker 向父进程发送通知。通知类型整理如下:
| Sender | 类型 | 说明 |
|---|---|---|
| Workder | running | worker 运行中。 |
| ActiveSpeakerObserver | dominantspeaker | 当前主导发言者。 |
| AudioLevelObserver | volumes | 当前发言者的音量。 |
| - | silence | 之前发言者已静音。 |
| Consumer | producerpause | 生产者已暂停。 |
| - | producerresume | 生产者已恢复。 |
| - | producerclose | 生产者已关闭 |
| - | trace | 跟踪消费者信息。类型包括:rtp、keyframe、nack、pli 和 fir。 |
| DataConsumer | bufferedamountlow | 数据消费者 Sctp Buffer 低。 |
| - | dataproducerclose | 数据生产者已关闭。 |
| PlainTransport | tuple | TransportTuple。 当 comedia 为 true 时,通过收到的数据提取到 TransportTuple。 |
| - | rtcptuple | TransportTuple。 当 comedia 为 true 且 rtcpMux 为 false, 通过收到的数据提取到 TransportTuple。 |
| Producer | videoorientationchange | 视频方向发生改变。 |
| - | score | Rtp 流的质量评分。 |
| - | trace | 跟踪生产者信息。类型包括:rtp、keyframe、nack、pli 和 fir。 |
| SctpAssociation | sctpsendbufferfull | DataConsumer 的 Sctp 发送 Buffer 已满。 |
| SimpleConsumer | score | Rtp 流的质量评分。 |
| SimulcastConsumer | score | Rtp 流的质量评分。包含自身的和 Producer 的。 |
| - | layerschange | Layers 已改变。 |
| SvcConsumer | score | Rtp 流的质量评分。包含自身的和 Producer 的。 |
| - | layerschange | Layers 已改变。 |
| Transport | trace | 跟踪 Transport 信息。类型包括:probation 和 bwe。 |
| - | sctpstatechange | Sctp 状态已改变。 |
| WebRtcTransport | iceselectedtuplechange | Ice 选择的 TransportTuple 已改变。 |
| - | icestatechange | Ice 状态已改变。 |
| - | dtlsstatechange | Dtls 状态已改变。 状态包括:connecting、connected、completed、disconnected、closed 和 failed。 |
六、PayloadChannelSocket 通知类型
为了方便使用, mediasoup 定义了 PayloadChannelNotifier 类用于 worker 向父进程发送通知。通知类型整理如下:
| Sender | 类型 | 说明 |
|---|---|---|
| DirectTransport | rtp | Rtp 包。 |
| - | rtcp | Rtcp 包。 |
| - | message | 消息。 |
七、worker 进程的启动
worker 是可执行程序,(一般来说)需要通过其他进程来启动。
启动时首先需要设置环境变量 MEDIASOUP_VERSION,通常设置为 mediaoup 真实的版本号。当然,如果非要设置成其他内容也没关系。
// File: worker/src/main.cpp
// Ensure we are called by our Node library.
if (!std::getenv("MEDIASOUP_VERSION"))
{
MS_ERROR_STD("you don't seem to be my real father!");
std::_Exit(EXIT_FAILURE);
}
还可以以命令行参数的方式设置 logLevel、logTags、rtcMinPort 和 rtcMaxPort、dtlsCertificateFile 和dtlsPrivateKeyFile,分别表示日志等级、日志标签(如ice、dtls等,控制哪些类的日志才会传出)、最小和最大 rtc 端口,以及dtls 证书文件和私钥的物理路径。这些参数都是可选的,如果未提供则会使用默认值或自动生成。
因为 worker 是独立进程,需要和父进程通信。以 Linux 为例,在 fork 子进程后会将父进程的文件描述符传递到子进程中。具体来说Node.js 程序 fork worker 进程之前,会创建几个 libuv 概念下而非 Linux 概念下的抽象意义上的 pipe,在Linux 中使用的是 UNIX Domain Socket。fork 进程后,会在子进程将要使用的文件描述符重定向。这里子进程期望持有的文件描述符是3-6,而实际上父进程创建的可能是 11-15,fork 之后子进程得到的还是 11-15,只要在子进程中使用 fcntl系统调用重定向即可。通过合理的数量和顺序上的约定能确定重定向为 3-6。最终在子进程中 exec mediasoup-
worker(见:uv__process_child_init)。
mediasoup 抽象出叫做 ChannelSocket 和 PayloadChannelSocket 的概念来表示 worker
和父进程的通信信道。
mediasoup 最初只使用了 1 个文件描述符,后来改为了 2 个,再后来改为了 4 个。
八、以库的方式使用 worker
在较长的一段时间,worker 都是以进程的方式运行,不过直到 2021 年 3 月发布的 3.7.0 开始, 准确地说是从 1a805366的这次提交开始,已经支持以库的方式使用。
如果要像 mediasoup-sfu-cpp 那样用纯C++ 实现整个 mediasoup 服务端,则可以直接调用 mediasoup_worker_run 方法。当然,也就不用设置环境 MEDIASOUP_VERSION 变量了。
// File: worker/src/lib.hpp
extern "C" int mediasoup_worker_run(
int argc,
char* argv[],
const char* version,
int consumerChannelFd,
int producerChannelFd,
int payloadConsumeChannelFd,
int payloadProduceChannelFd,
ChannelReadFn channelReadFn,
ChannelReadCtx channelReadCtx,
ChannelWriteFn channelWriteFn,
ChannelWriteCtx channelWriteCtx,
PayloadChannelReadFn payloadChannelReadFn,
PayloadChannelReadCtx payloadChannelReadCtx,
PayloadChannelWriteFn payloadChannelWriteFn,
PayloadChannelWriteCtx payloadChannelWriteCtx);
以进程方式运行时进程间通所使用的是文件描述符(consumerChannelFd等),以库的方式运行则可以将函数指针传递给 mediasoup_worker_run 的其他参数(PayloadChannelReadFn等),都能够构造出 ChannelSocket 和 PayloadChannelSocket。
还可以用多个线程执行 mediasoup_worker_run,以达到多个 worker 进程的效果。
备注:mediasoup-sfu-cpp 是基于旧版 mediasoup,尚未更新至可以使用 mediasoup_worker_run 方法的版本。
参考资料
- 现代C++和Mediasoup的WebRTC集群服务实践
- 纯 C++ 实现的 Mediasoup 闫华
- 【流媒体】Mediasoup库的架构(C++部分)
- libuv
- mediasoup v3 Design
- mediasoup v3 API
- mediasoup-client v3 API
JS部分
JS部分的重点是Worker.js
1、先看整体
从Worker.JS这个文件来看,上面构造了一些变量,如process、channel等,下面是一个Worker的类
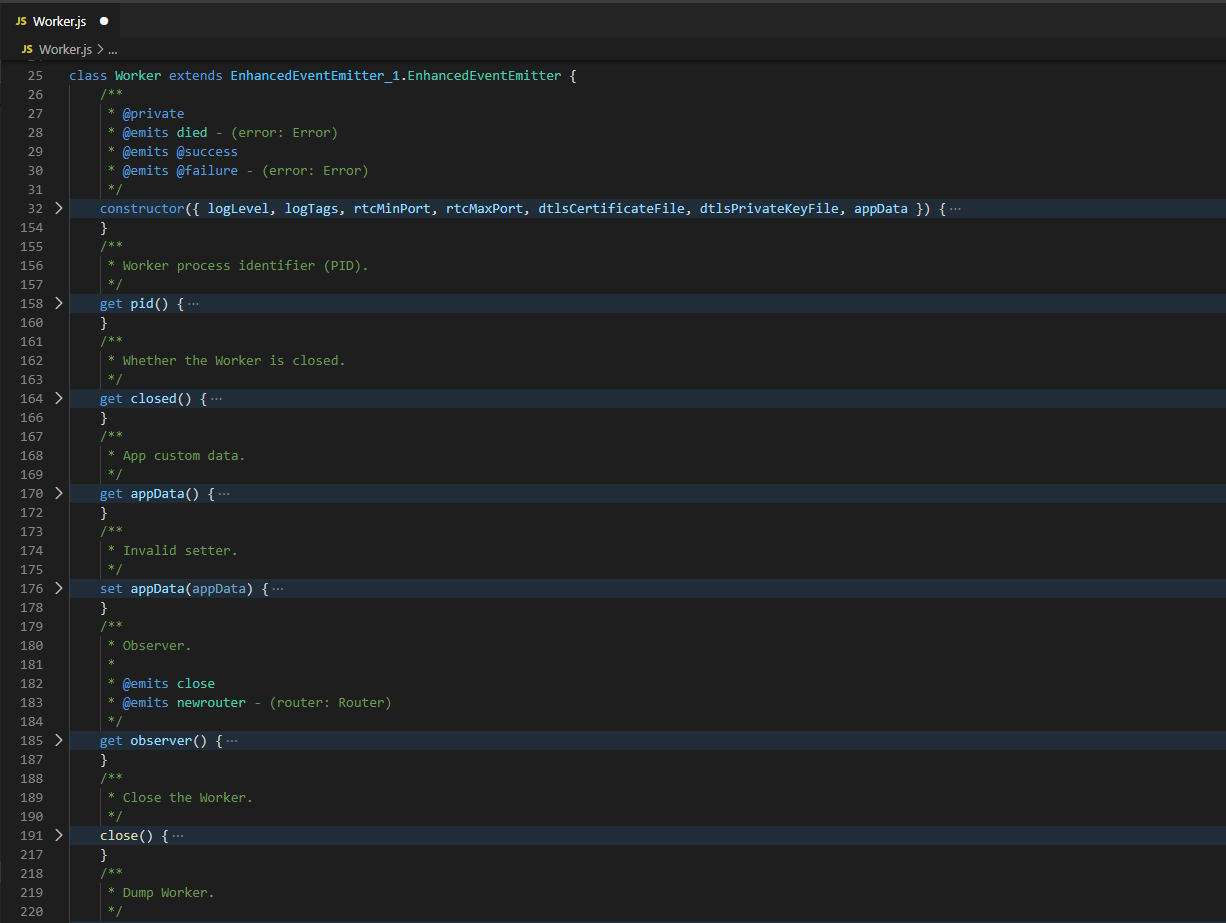
2、展开Worker
展开Worker类可以看见它有11个函数,分别是
1.constructor()——构造函数
2.get pid()——获得Worker进程的ID
3.get closed()——确认Worker是否关闭
4.get appData()——返回custom的数据
5.set appData()——当设置无效时抛出异常信息
6.get observer()——开启观察者模式
7.close()——关闭Worker
8.async dump()——转存Worker
9.async getResourceUsage()——获得worker进程资源使用信息
10.async updateSettings()——更新设置
11.async createRouter()——创建房间
3、constructor
我们的重点是channel怎么建立的,所以重点关注第1个构造函数constructor()
this._child = child_process_1.spawn(
// command
spawnBin,
// args
spawnArgs,
// options
{
env: {
MEDIASOUP_VERSION: '3.6.7'
},
detached: false,
// fd 0 (stdin) : Just ignore it.
// fd 1 (stdout) : Pipe it for 3rd libraries that log their own stuff.
// fd 2 (stderr) : Same as stdout.
// fd 3 (channel) : Producer Channel fd.
// fd 4 (channel) : Consumer Channel fd.
// fd 5 (channel) : Producer PayloadChannel fd.
// fd 6 (channel) : Consumer PayloadChannel fd.
stdio: ['ignore', 'pipe', 'pipe', 'pipe', 'pipe', 'pipe', 'pipe'],
windowsHide: true
});
this._pid = this._child.pid;
this._channel = new Channel_1.Channel({
producerSocket: this._child.stdio[3],
consumerSocket: this._child.stdio[4],
pid: this._pid
});
this._payloadChannel = new PayloadChannel_1.PayloadChannel({
// NOTE: TypeScript does not like more than 5 fds.
// @ts-ignore
producerSocket: this._child.stdio[5],
// @ts-ignore
consumerSocket: this._child.stdio[6]
});
spawn里标准io口有7个参数,分别是标准输入、标准输出、标准错误、以及4个通道,源码中对标准输入规定的是ignore,其它6个参数是pipe(管道),这里要注意的是,这个管道并不是Linux进程间通信的匿名管道或有名管道,它是UnixSocketPair,因为只有UnixSocketPair才是全双工通信,从代码中我们也能看出它是全双工的,而匿名(有名)管道是半双工通信
接着重点是 this._channel = new Channel_1.Channel ,它创建了一个channel,并传入了3个参数,分别是stdio[3]和stdio[4],以及pid(因为可能会有多个Worker,而一个进程对应一个Worker,所以需要知道每个进程的ID),这样通过这个channel,JS部分便能和C++部分通信了
4、channel的建立
创建这个channel会调用channel.js里的构造函数,我们来看看channel.js里的代码
this._consumerSocket.on('data', (buffer) => {
if (!this._recvBuffer) {
this._recvBuffer = buffer;
}
else {
this._recvBuffer = Buffer.concat([this._recvBuffer, buffer], this._recvBuffer.length + buffer.length);
}
if (this._recvBuffer.length > NS_PAYLOAD_MAX_LEN) {
logger.error('receiving buffer is full, discarding all data into it');
// Reset the buffer and exit.
this._recvBuffer = undefined;
return;
}
while (true) // eslint-disable-line no-constant-condition
{
let nsPayload;
try {
nsPayload = netstring.nsPayload(this._recvBuffer);
}
catch (error) {
logger.error('invalid netstring data received from the worker process: %s', String(error));
// Reset the buffer and exit.
this._recvBuffer = undefined;
return;
}
// Incomplete netstring message.
if (nsPayload === -1)
return;
try {
// We can receive JSON messages (Channel messages) or log strings.
switch (nsPayload[0]) {
// 123 = '{' (a Channel JSON messsage).
case 123:
this._processMessage(JSON.parse(nsPayload.toString('utf8')));
break;
// 68 = 'D' (a debug log).
case 68:
logger.debug(`[pid:${pid}] ${nsPayload.toString('utf8', 1)}`);
break;
// 87 = 'W' (a warn log).
case 87:
logger.warn(`[pid:${pid}] ${nsPayload.toString('utf8', 1)}`);
break;
// 69 = 'E' (an error log).
case 69:
logger.error(`[pid:${pid} ${nsPayload.toString('utf8', 1)}`);
break;
// 88 = 'X' (a dump log).
case 88:
// eslint-disable-next-line no-console
console.log(nsPayload.toString('utf8', 1));
break;
default:
// eslint-disable-next-line no-console
console.warn(`worker[pid:${pid}] unexpected data: %s`, nsPayload.toString('utf8', 1));
}
}
catch (error) {
logger.error('received invalid message from the worker process: %s', String(error));
}
// Remove the read payload from the buffer.
this._recvBuffer =
this._recvBuffer.slice(netstring.nsLength(this._recvBuffer));
if (!this._recvBuffer.length) {
this._recvBuffer = undefined;
return;
}
}
});
在channel.js中,上面这片代码启动了Socket的侦听函数,当C++传来数据时,会促发recvBuffer接收数据,然后进入while循环处理数据,做出相应的处理
5、JS部分的总结
经过上述步骤后,便拿到了SocketPair一端的文件描述符,实际不管是Socket还是普通文件,都是通过文件描述符的方式来进行的操作
C++部分
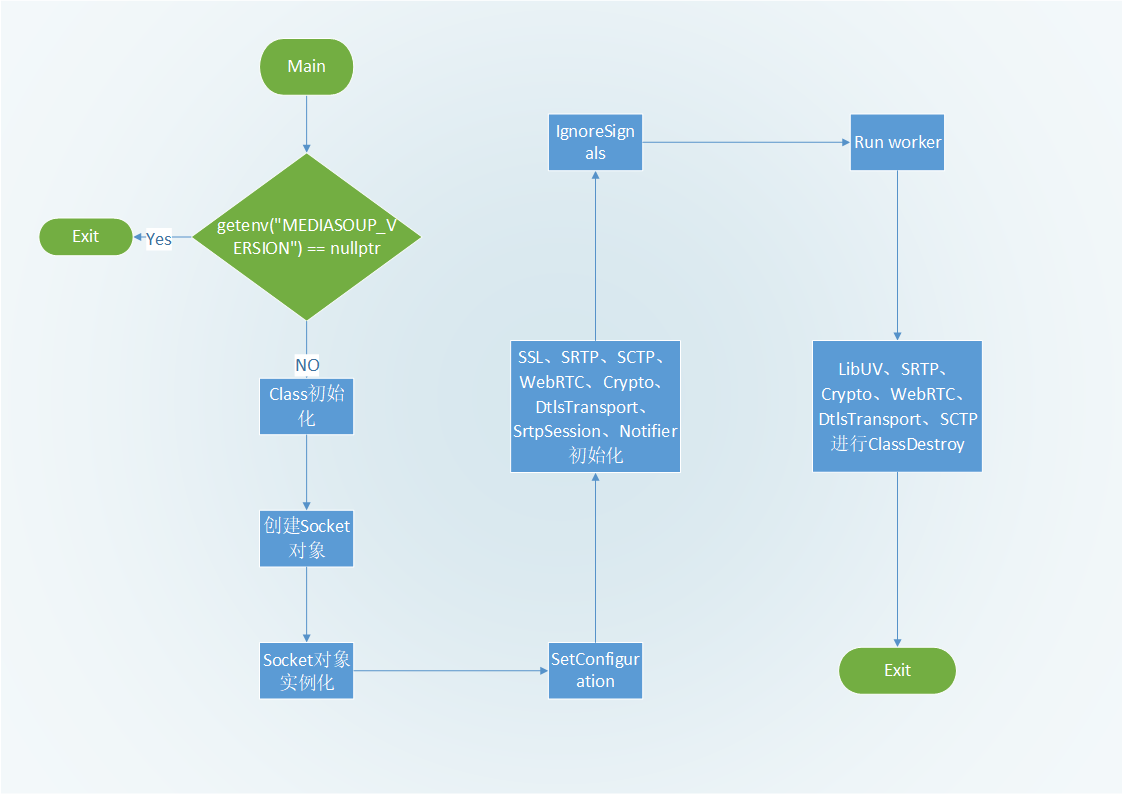
1、main流程图
main主函数部分的模块可分为下图的几个步骤,在最新版V3的源码中,main创建了两个Socket,分别是Channel和PayloadChannel
2、main.cpp
#define MS_CLASS "mediasoup-worker"
// #define MS_LOG_DEV_LEVEL 3
#include "common.hpp"
#include "DepLibSRTP.hpp"
#include "DepLibUV.hpp"
#include "DepLibWebRTC.hpp"
#include "DepOpenSSL.hpp"
#include "DepUsrSCTP.hpp"
#include "Logger.hpp"
#include "MediaSoupErrors.hpp"
#include "Settings.hpp"
#include "Utils.hpp"
#include "Worker.hpp"
#include "Channel/Notifier.hpp"
#include "Channel/UnixStreamSocket.hpp"
#include "PayloadChannel/Notifier.hpp"
#include "PayloadChannel/UnixStreamSocket.hpp"
#include "RTC/DtlsTransport.hpp"
#include "RTC/SrtpSession.hpp"
#include <uv.h>
#include <cerrno>
#include <csignal> // sigaction()
#include <cstdlib> // std::_Exit(), std::genenv()
#include <iostream> // std::cerr, std::endl
#include <map>
#include <string>
static constexpr int ConsumerChannelFd{ 3 };
static constexpr int ProducerChannelFd{ 4 };
static constexpr int PayloadConsumerChannelFd{ 5 };
static constexpr int PayloadProducerChannelFd{ 6 };
void IgnoreSignals();
int main(int argc, char* argv[])
{
// Ensure we are called by our Node library.
if (std::getenv("MEDIASOUP_VERSION") == nullptr)
{
MS_ERROR_STD("you don't seem to be my real father!");
std::_Exit(EXIT_FAILURE);
}
std::string version = std::getenv("MEDIASOUP_VERSION");
// Initialize libuv stuff (we need it for the Channel).
DepLibUV::ClassInit();
// Channel socket (it will be handled and deleted by the Worker).
Channel::UnixStreamSocket* channel{ nullptr };
// PayloadChannel socket (it will be handled and deleted by the Worker).
PayloadChannel::UnixStreamSocket* payloadChannel{ nullptr };
try
{
channel = new Channel::UnixStreamSocket(ConsumerChannelFd, ProducerChannelFd);
}
catch (const MediaSoupError& error)
{
MS_ERROR_STD("error creating the Channel: %s", error.what());
std::_Exit(EXIT_FAILURE);
}
try
{
payloadChannel =
new PayloadChannel::UnixStreamSocket(PayloadConsumerChannelFd, PayloadProducerChannelFd);
}
catch (const MediaSoupError& error)
{
MS_ERROR_STD("error creating the RTC Channel: %s", error.what());
std::_Exit(EXIT_FAILURE);
}
// Initialize the Logger.
Logger::ClassInit(channel);
try
{
Settings::SetConfiguration(argc, argv);
}
catch (const MediaSoupTypeError& error)
{
MS_ERROR_STD("settings error: %s", error.what());
// 42 is a custom exit code to notify "settings error" to the Node library.
std::_Exit(42);
}
catch (const MediaSoupError& error)
{
MS_ERROR_STD("unexpected settings error: %s", error.what());
std::_Exit(EXIT_FAILURE);
}
MS_DEBUG_TAG(info, "starting mediasoup-worker process [version:%s]", version.c_str());
#if defined(MS_LITTLE_ENDIAN)
MS_DEBUG_TAG(info, "little-endian CPU detected");
#elif defined(MS_BIG_ENDIAN)
MS_DEBUG_TAG(info, "big-endian CPU detected");
#else
MS_WARN_TAG(info, "cannot determine whether little-endian or big-endian");
#endif
#if defined(INTPTR_MAX) && defined(INT32_MAX) && (INTPTR_MAX == INT32_MAX)
MS_DEBUG_TAG(info, "32 bits architecture detected");
#elif defined(INTPTR_MAX) && defined(INT64_MAX) && (INTPTR_MAX == INT64_MAX)
MS_DEBUG_TAG(info, "64 bits architecture detected");
#else
MS_WARN_TAG(info, "cannot determine 32 or 64 bits architecture");
#endif
Settings::PrintConfiguration();
DepLibUV::PrintVersion();
try
{
// Initialize static stuff.
DepOpenSSL::ClassInit();
DepLibSRTP::ClassInit();
DepUsrSCTP::ClassInit();
DepLibWebRTC::ClassInit();
Utils::Crypto::ClassInit();
RTC::DtlsTransport::ClassInit();
RTC::SrtpSession::ClassInit();
Channel::Notifier::ClassInit(channel);
PayloadChannel::Notifier::ClassInit(payloadChannel);
// Ignore some signals.
IgnoreSignals();
// Run the Worker.
Worker worker(channel, payloadChannel);
// Free static stuff.
DepLibUV::ClassDestroy();
DepLibSRTP::ClassDestroy();
Utils::Crypto::ClassDestroy();
DepLibWebRTC::ClassDestroy();
RTC::DtlsTransport::ClassDestroy();
DepUsrSCTP::ClassDestroy();
// Wait a bit so peding messages to stdout/Channel arrive to the Node
// process.
uv_sleep(200);
std::_Exit(EXIT_SUCCESS);
}
catch (const MediaSoupError& error)
{
MS_ERROR_STD("failure exit: %s", error.what());
std::_Exit(EXIT_FAILURE);
}
}
void IgnoreSignals()
{
#ifndef _WIN32
MS_TRACE();
int err;
struct sigaction act; // NOLINT(cppcoreguidelines-pro-type-member-init)
// clang-format off
std::map<std::string, int> ignoredSignals =
{
{ "PIPE", SIGPIPE },
{ "HUP", SIGHUP },
{ "ALRM", SIGALRM },
{ "USR1", SIGUSR1 },
{ "USR2", SIGUSR2 }
};
// clang-format on
act.sa_handler = SIG_IGN; // NOLINT(cppcoreguidelines-pro-type-cstyle-cast)
act.sa_flags = 0;
err = sigfillset(&act.sa_mask);
if (err != 0)
MS_THROW_ERROR("sigfillset() failed: %s", std::strerror(errno));
for (auto& kv : ignoredSignals)
{
auto& sigName = kv.first;
int sigId = kv.second;
err = sigaction(sigId, &act, nullptr);
if (err != 0)
MS_THROW_ERROR("sigaction() failed for signal %s: %s", sigName.c_str(), std::strerror(errno));
}
#endif
}
3、Channel Socket的建立
提取socket这部分的代码,可以看见源码中创建了2个socket,分别是Channel和PayloadChannel
然后在try{}catch{}表达式中,分别对两个socket对象实例化,这里要注意的是,new中传入的参数Fd,对照JS部分代码的注释可以知道这是固定的3456,而非标准输入0、输出1、错误2
// Channel socket (it will be handled and deleted by the Worker).
Channel::UnixStreamSocket* channel{ nullptr };
// PayloadChannel socket (it will be handled and deleted by the Worker).
PayloadChannel::UnixStreamSocket* payloadChannel{ nullptr };
try
{
channel = new Channel::UnixStreamSocket(ConsumerChannelFd, ProducerChannelFd);
}
catch (const MediaSoupError& error)
{
MS_ERROR_STD("error creating the Channel: %s", error.what());
std::_Exit(EXIT_FAILURE);
}
try
{
payloadChannel =
new PayloadChannel::UnixStreamSocket(PayloadConsumerChannelFd, PayloadProducerChannelFd);
}
catch (const MediaSoupError& error)
{
MS_ERROR_STD("error creating the RTC Channel: %s", error.what());
std::_Exit(EXIT_FAILURE);
}
4、UnixStreamSocket.cpp
上述 socket 在 new 之后会跳转到 UnixStreamSocket.cpp 执行下面这个函数
UnixStreamSocket::UnixStreamSocket(int consumerFd, int producerFd)
: consumerSocket(consumerFd, NsMessageMaxLen, this), producerSocket(producerFd, NsMessageMaxLen)
{
MS_TRACE_STD();
}
这个函数的关键不是函数体里的内容,而是在参数后面又创建了一个consumerScoket和producerSocket,并传入参数Fd和消息最大长度
5、consumerSocket
接着再进入consumerSocket,可以看到在这个构造函数后面对其父类进行初始化,传入参数fd,缓冲区大小,以及角色
ConsumerSocket::ConsumerSocket(int fd, size_t bufferSize, Listener* listener)
: ::UnixStreamSocket(fd, bufferSize, ::UnixStreamSocket::Role::CONSUMER), listener(listener)
{
MS_TRACE_STD();
}
6、UnixStreamSocket
继续追根溯源,进入UnixStreamSocket的构造函数
在这部分代码中先构造了一个uv_pipe_t的对象,这个是libuv库中的pipe,赋值给uvHandle。然后把对象指针this赋值给私有定义的data
接着是对uv_pipe的初始化,有3个参数,分别是
- 事件循环中的loop
- 刚才创建的对象
- ipc,用于指示pipe是否被用于两个进程之间
初始化结束后,调用uv_pipe_open打开fd所指向的pipe
打开之后进入uv_read_start,这个函数是用来启动读的操作,它同样也有三个参数:
- uvHandle,里面存放的是这个对象本身
- onAlloc,当buffer不足时回调这个函数,便能重新创建一个buffer
- onRead,接收pipe的另一端发送的数据
UnixStreamSocket::UnixStreamSocket(int fd, size_t bufferSize, UnixStreamSocket::Role role)
: bufferSize(bufferSize), role(role)
{
MS_TRACE_STD();
int err;
this->uvHandle = new uv_pipe_t;
this->uvHandle->data = static_cast<void*>(this);
err = uv_pipe_init(DepLibUV::GetLoop(), this->uvHandle, 0);
if (err != 0)
{
delete this->uvHandle;
this->uvHandle = nullptr;
MS_THROW_ERROR_STD("uv_pipe_init() failed: %s", uv_strerror(err));
}
err = uv_pipe_open(this->uvHandle, fd);
if (err != 0)
{
uv_close(reinterpret_cast<uv_handle_t*>(this->uvHandle), static_cast<uv_close_cb>(onClose));
MS_THROW_ERROR_STD("uv_pipe_open() failed: %s", uv_strerror(err));
}
if (this->role == UnixStreamSocket::Role::CONSUMER)
{
// Start reading.
err = uv_read_start(
reinterpret_cast<uv_stream_t*>(this->uvHandle),
static_cast<uv_alloc_cb>(onAlloc),
static_cast<uv_read_cb>(onRead));
if (err != 0)
{
uv_close(reinterpret_cast<uv_handle_t*>(this->uvHandle), static_cast<uv_close_cb>(onClose));
MS_THROW_ERROR_STD("uv_read_start() failed: %s", uv_strerror(err));
}
}
// NOTE: Don't allocate the buffer here. Instead wait for the first uv_alloc_cb().
}
7、onRead
重点是这个onRead函数,接下来看这部分的代码
onRead有三个参数,分别是:
- handle,刚才创建的对象
- nread,读取的数据大小
- buf,存放数据的地方
在函数体里,因为要访问到另一端JS传过来的数据,所以得使用static全局静态函数。具体怎么做呢?首先对handle->data做了强制类型转换,拿到对象里的socket,这样便可在对象里进行操作,最后再调用socket->OnUvRead这个方法
inline static void onRead(uv_stream_t* handle, ssize_t nread, const uv_buf_t* buf)
{
auto* socket = static_cast<UnixStreamSocket*>(handle->data);
if (socket)
socket->OnUvRead(nread, buf);
}
8、OnUvRead
我们再进入OnUvRead这个函数
在这个函数中首先对nread做了一些判断,如果数据不为空则调用UserOnUnixStreamRead(),注意看它的注释 //Notifythe subclass 通知子类
inline void UnixStreamSocket::OnUvRead(ssize_t nread, const uv_buf_t* /*buf*/)
{
MS_TRACE_STD();
if (nread == 0)
return;
// Data received.
if (nread > 0)
{
// Update the buffer data length.
this->bufferDataLen += static_cast<size_t>(nread);
// Notify the subclass.
UserOnUnixStreamRead();
}
// Peer disconnected.
else if (nread == UV_EOF || nread == UV_ECONNRESET)
{
this->isClosedByPeer = true;
// Close local side of the pipe.
Close();
// Notify the subclass.
UserOnUnixStreamSocketClosed();
}
// Some error.
else
{
MS_ERROR_STD("read error, closing the pipe: %s", uv_strerror(nread));
this->hasError = true;
// Close the socket.
Close();
// Notify the subclass.
UserOnUnixStreamSocketClosed();
}
}
9、UserOnUnixStreamRead
进入子类函数,先是netstring_read()函数进行字符串读取,返回0
接着做一个判断,若 nsRet !=0 说明出错,没有读取到数据,后面的switch都是在做错误类型的判断
如果没有出错的话,会先计算读取的字符串,然后再调用OnConsumerSocketMessage()这个函数
void ConsumerSocket::UserOnUnixStreamRead()
{
MS_TRACE_STD();
// Be ready to parse more than a single message in a single chunk.
while (true)
{
if (IsClosed())
return;
size_t readLen = this->bufferDataLen - this->msgStart;
char* msgStart = nullptr;
size_t msgLen;
int nsRet = netstring_read(
reinterpret_cast<char*>(this->buffer + this->msgStart), readLen, &msgStart, &msgLen);
if (nsRet != 0)
{
switch (nsRet)
{
case NETSTRING_ERROR_TOO_SHORT:
{
// Check if the buffer is full.
if (this->bufferDataLen == this->bufferSize)
{
// First case: the incomplete message does not begin at position 0 of
// the buffer, so move the incomplete message to the position 0.
if (this->msgStart != 0)
{
std::memmove(this->buffer, this->buffer + this->msgStart, readLen);
this->msgStart = 0;
this->bufferDataLen = readLen;
}
// Second case: the incomplete message begins at position 0 of the buffer.
// The message is too big, so discard it.
else
{
MS_ERROR_STD(
"no more space in the buffer for the unfinished message being parsed, "
"discarding it");
this->msgStart = 0;
this->bufferDataLen = 0;
}
}
// Otherwise the buffer is not full, just wait.
return;
}
case NETSTRING_ERROR_TOO_LONG:
{
MS_ERROR_STD("NETSTRING_ERROR_TOO_LONG");
break;
}
case NETSTRING_ERROR_NO_COLON:
{
MS_ERROR_STD("NETSTRING_ERROR_NO_COLON");
break;
}
case NETSTRING_ERROR_NO_COMMA:
{
MS_ERROR_STD("NETSTRING_ERROR_NO_COMMA");
break;
}
case NETSTRING_ERROR_LEADING_ZERO:
{
MS_ERROR_STD("NETSTRING_ERROR_LEADING_ZERO");
break;
}
case NETSTRING_ERROR_NO_LENGTH:
{
MS_ERROR_STD("NETSTRING_ERROR_NO_LENGTH");
break;
}
}
// Error, so reset and exit the parsing loop.
this->msgStart = 0;
this->bufferDataLen = 0;
return;
}
// If here it means that msgStart points to the beginning of a message
// with msgLen bytes length, so recalculate readLen.
readLen =
reinterpret_cast<const uint8_t*>(msgStart) - (this->buffer + this->msgStart) + msgLen + 1;
this->listener->OnConsumerSocketMessage(this, msgStart, msgLen);
// If there is no more space available in the buffer and that is because
// the latest parsed message filled it, then empty the full buffer.
if ((this->msgStart + readLen) == this->bufferSize)
{
this->msgStart = 0;
this->bufferDataLen = 0;
}
// If there is still space in the buffer, set the beginning of the next
// parsing to the next position after the parsed message.
else
{
this->msgStart += readLen;
}
// If there is more data in the buffer after the parsed message
// then parse again. Otherwise break here and wait for more data.
if (this->bufferDataLen > this->msgStart)
{
continue;
}
break;
}
}
10、OnConsumerSocketMessage
进入OnConsumerSocketMessage()这个函数
JS在传输之前会先把数据做成json的格式,然后以字符串的形式传输过来,C++收到字符串后,会把它转化为json对象
又调用Channel::Request,传入这个json对象
void UnixStreamSocket::OnConsumerSocketMessage(
ConsumerSocket* /*consumerSocket*/, char* msg, size_t msgLen)
{
MS_TRACE_STD();
try
{
json jsonMessage = json::parse(msg, msg + msgLen);
auto* request = new Channel::Request(this, jsonMessage);
// Notify the listener.
try
{
this->listener->OnChannelRequest(this, request);
}
catch (const MediaSoupTypeError& error)
{
request->TypeError(error.what());
}
catch (const MediaSoupError& error)
{
request->Error(error.what());
}
// Delete the Request.
delete request;
}
catch (const json::parse_error& error)
{
MS_ERROR_STD("JSON parsing error: %s", error.what());
}
catch (const MediaSoupError& error)
{
MS_ERROR_STD("discarding wrong Channel request");
}
}
11、Request
进入Channel::Request
可以看到这个json里面封装的是一个四元组,其包含:
- id——方法的id
- method——字符串的名字
- internal——自定义的内部格式
- data——传入的数据(可能有可能没有)
解析完数据之后,就把它们放入Request对象中的各个数据域this->id、this->method、this->internal、this->data
Request::Request(Channel::UnixStreamSocket* channel, json& jsonRequest) : channel(channel)
{
MS_TRACE();
auto jsonIdIt = jsonRequest.find("id");
if (jsonIdIt == jsonRequest.end() || !Utils::Json::IsPositiveInteger(*jsonIdIt))
MS_THROW_ERROR("missing id");
this->id = jsonIdIt->get<uint32_t>();
auto jsonMethodIt = jsonRequest.find("method");
if (jsonMethodIt == jsonRequest.end() || !jsonMethodIt->is_string())
MS_THROW_ERROR("missing method");
this->method = jsonMethodIt->get<std::string>();
auto methodIdIt = Request::string2MethodId.find(this->method);
if (methodIdIt == Request::string2MethodId.end())
{
Error("unknown method");
MS_THROW_ERROR("unknown method '%s'", this->method.c_str());
}
this->methodId = methodIdIt->second;
auto jsonInternalIt = jsonRequest.find("internal");
if (jsonInternalIt != jsonRequest.end() && jsonInternalIt->is_object())
this->internal = *jsonInternalIt;
else
this->internal = json::object();
auto jsonDataIt = jsonRequest.find("data");
if (jsonDataIt != jsonRequest.end() && jsonDataIt->is_object())
this->data = *jsonDataIt;
else
this->data = json::object();
}
12、OnConsumerSocketMessage
完成上述步骤后,便又返回OnConsumerSocketMessage()
因为之前已经把数据转存到Request中,所以可以直接对其进行操作,这时候调用
this->listener->OnChannelRequest(this, request);
要注意的是,这里的listener实际上是Worker
13、OnChannelRequest
当Worker接收到Request的数据后,便能做出相应的处理了,接下来进入Worker.cpp的OnChannelRequest()
switch里就会根据methodId做出相应的处理,当它为
WORKER_DUMP,表示将Worker中的Router信息都打印出来WORKER_GET_RESOURCE_USAGE,表示将RU的参数信息打印出来WORKER_UPDATE_SETTINGS,表示更新设置WORKER_CREATE_ROUTER,表示创建RouterROUTER_CLOSE,表示关闭
如果为其他的,就跳转到router相关的处理函数中,若router处理不了,就再往下传,一层一层传下去
inline void Worker::OnChannelRequest(Channel::UnixStreamSocket* /*channel*/, Channel::Request* request)
{
MS_TRACE();
MS_DEBUG_DEV(
"Channel request received [method:%s, id:%" PRIu32 "]", request->method.c_str(), request->id);
switch (request->methodId)
{
case Channel::Request::MethodId::WORKER_DUMP:
{
json data = json::object();
FillJson(data);
request->Accept(data);
break;
}
case Channel::Request::MethodId::WORKER_GET_RESOURCE_USAGE:
{
json data = json::object();
FillJsonResourceUsage(data);
request->Accept(data);
break;
}
case Channel::Request::MethodId::WORKER_UPDATE_SETTINGS:
{
Settings::HandleRequest(request);
break;
}
case Channel::Request::MethodId::WORKER_CREATE_ROUTER:
{
std::string routerId;
// This may throw.
SetNewRouterIdFromInternal(request->internal, routerId);
auto* router = new RTC::Router(routerId);
this->mapRouters[routerId] = router;
MS_DEBUG_DEV("Router created [routerId:%s]", routerId.c_str());
request->Accept();
break;
}
case Channel::Request::MethodId::ROUTER_CLOSE:
{
// This may throw.
RTC::Router* router = GetRouterFromInternal(request->internal);
// Remove it from the map and delete it.
this->mapRouters.erase(router->id);
delete router;
MS_DEBUG_DEV("Router closed [id:%s]", router->id.c_str());
request->Accept();
break;
}
// Any other request must be delivered to the corresponding Router.
default:
{
// This may throw.
RTC::Router* router = GetRouterFromInternal(request->internal);
router->HandleRequest(request);
break;
}
}
}
原文出处:Mediasoup源码分析(二)Router的建立
在Channel建立后,上层应用发送数据请求传给底层C++,Router便能成功创建,本文将接着C++ Request继续分析源码,前面相关的流程请看(一)
Request
当传来的 MethodId 是 WORKER_CREATE_ROUTER 时,就表示要创建一个Router了,调用SetNewRouterIdFromInternal() 函数从internal中可以获取到Router的ID,然后再执行Router的构造函数,同时传入ID
接着调用Worker的私有成员mapRouters(这是一个无序键值对容器)存储Router和它的ID,最后再返还一个消息确认的信息给上层
这样Router便创建好了
case Channel::Request::MethodId::WORKER_CREATE_ROUTER:
{
std::string routerId;
// This may throw.
SetNewRouterIdFromInternal(request->internal, routerId);
auto* router = new RTC::Router(routerId);
this->mapRouters[routerId] = router;
MS_DEBUG_DEV("Router created [routerId:%s]", routerId.c_str());
request->Accept();
break;
}