Leveldb代码阅读笔记
原文出处:Leveldb代码阅读笔记
本文基于leveldb 1.9.0代码。
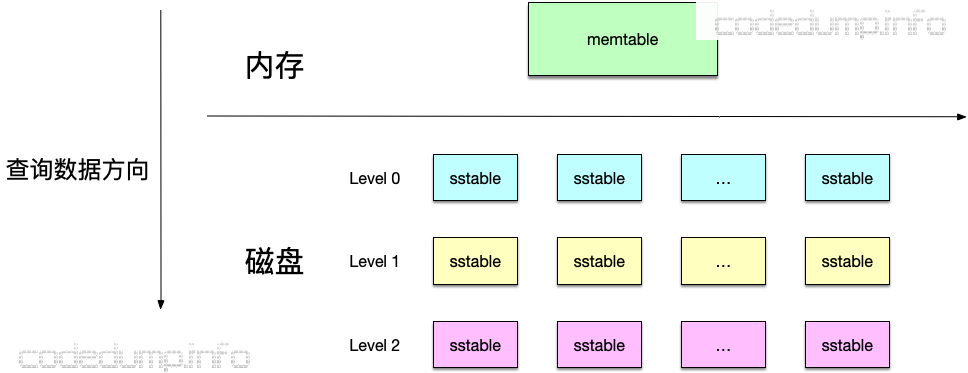
整体架构
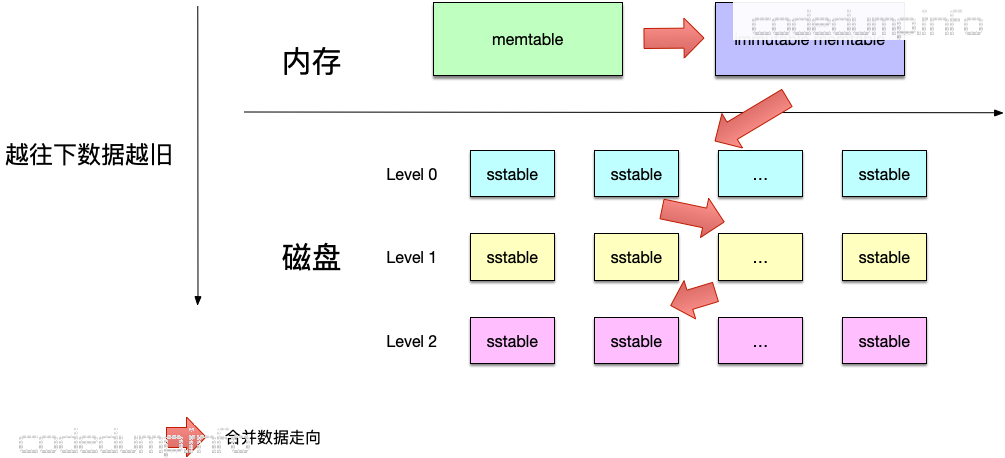
如上图,leveldb的数据存储在内存以及磁盘上,其中:
- memtable:存储在内存中的数据,使用skiplist实现。
- immutable memtable:与memtable一样,只不过这个memtable不能再进行修改,会将其中的数据落盘到level 0的sstable中。
- 多层sstable:leveldb使用多个层次来存储sstable文件,这些文件分布在磁盘上,这些文件都是根据键值有序排列的,其中0级的sstable的键值可能会重叠,而level 1及以上的sstable文件不会重叠。
在上面这个存储层次中,越靠上的数据越新,即同一个键值如果同时存在于memtable和immutable memtable中,则以memtable中的为准。
另外,图中还使用箭头来表示了合并数据的走向,即:
memtable -> immutable memtable -> level 0 sstable -> level 1 sstable -> ... -> level N sstable。
以下将针对这几部分展开讨论。
Log文件
写入数据的时候,最开始会写入到log文件中,由于是顺序写入文件,所以写入速度很快,可以马上返回。
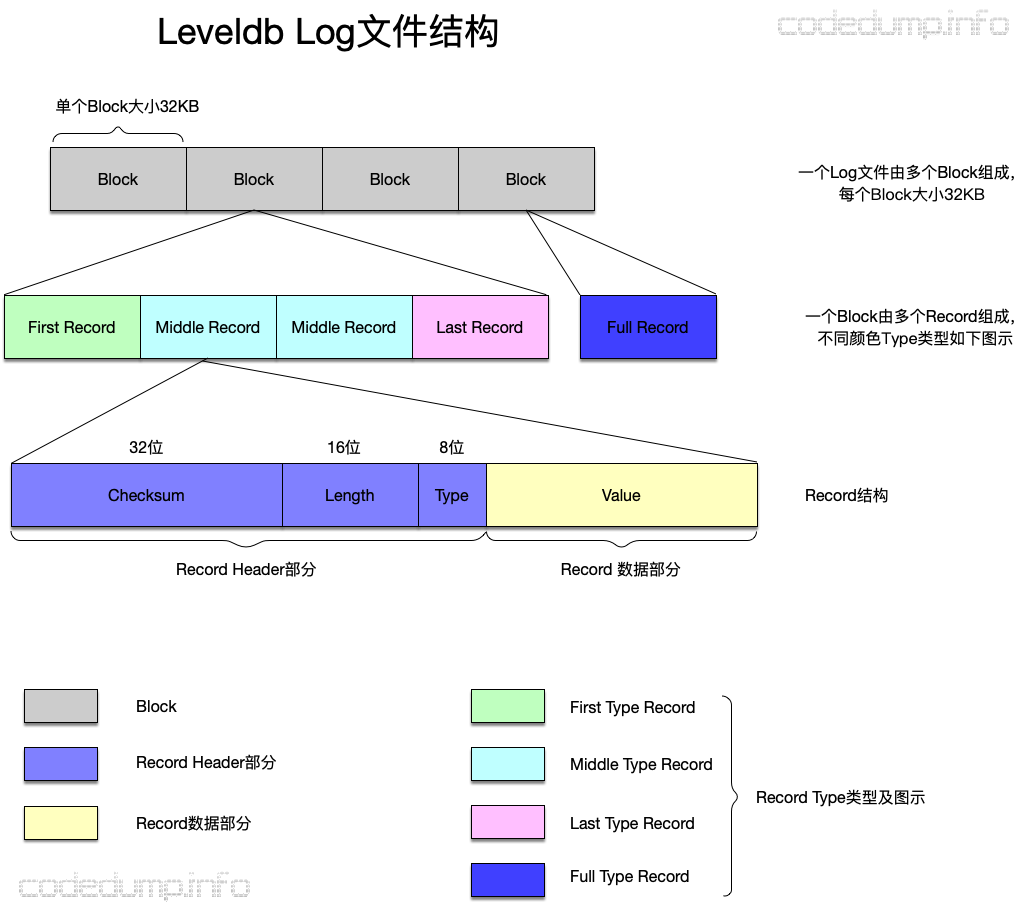
来看Log文件的结构:
- 一个Log文件由多个Block组成,每个Block大小为32KB。
- 一个Block内部又有多个Record组成,Record分为四种类型:
- Full:一个Record占满了整个Block存储空间。
- First:一个Block的第一个Record。
- Last:一个Block的最后一个Record。
- Middle:其余的都是Middle类型的Record。
- Record的结构如下:
- Header部分
- 32位长度的CRC Checksum:存储这个Record的数据校验值,用于检测Record合法性。
- 16位长度的Length:存储数据部分长度。
- 8位长度的Type:存储Record类型,就是上面说的四种类型。
- 数据部分
- Header部分
memtable
memtable用于存储在内存中还未落盘到sstable中的数据,这部分使用跳表(skiplist)做为底层的数据结构,这里先简单描述一下跳表的工作原理。
如果数据存放在一个普通的有序链表中,那么查找数据的时间复杂度就是O(n)。跳表的设计思想在于:链表中的每个元素,都有多个层次,查找某一个元素时,遍历该链表的时候,根据层次来跳过(skip)中间某些明显不满足需求的元素,以达到加快查找速度的目的,如下图所示:
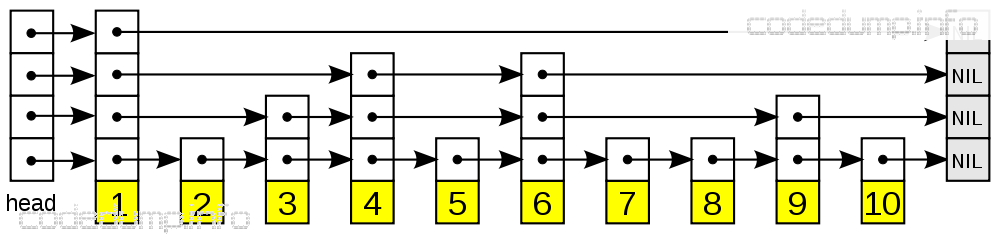
在以上这个跳表中,查找元素6的流程,大体如下:
- 构建一个每个链表元素最多有5个元素的跳表。
- 由于6大于链表的第一个元素1,因此如果存在必然在1之后的元素中,因此进入元素1的指针数组中,从上往下查找元素4:
- 第一层:指向的指针为Nil空指针,不满足需求,继续往下查找;
- 第二层:指向的指针保存的数据为4,小于待查找的元素4,因此如果元素6存在也必然在4之后,因此指针跳转到元素4所在的位置,继续从上往下开始查找。
- 到了元素4所在的指针数组,开始从上往下继续查找:
- 第一层:指向的指针保存的数据为6,查找完毕。
从上面的分析过程中可以看到:
- 跳表是一种以牺牲更多的存储空间换取查找速度,即“空间换时间”的数据结构。
- 跳表的每一层也都是一个有序链表。
- 如果一个元素出现在第i层的链表中,那么也必然会在第i层以下的链表中出现。
- 链表的每个节点中,垂直方向的数组存储的数据都是一样的,水平方向的指针指向链表的下一个元素。
- 最底层的链表包含所有元素,也就是说,在最底层数据结构退化为一个普通的有序链表。
sstable文件
大体结构
首先来看sstable文件的整体结构,如下图:
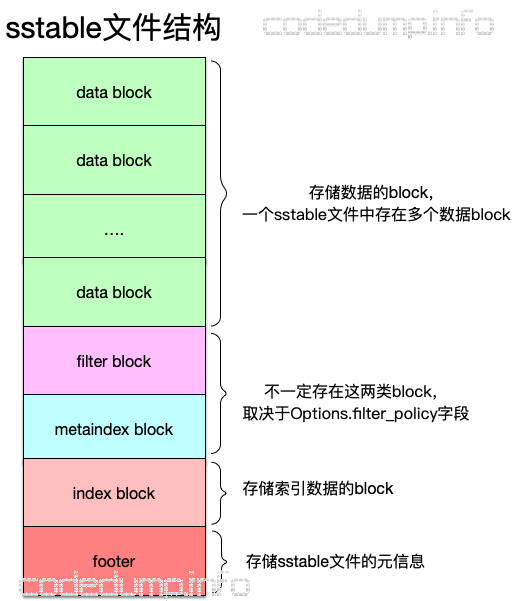
sstable文件中分为以下几个组成部分:
- data block:存储数据的block,由于一个block大小固定,因此每个sstable文件中有多个data block。
- filter block以及metaindex block:这两个block不一定存在于sstable,取决于Options中的
filter_policy参数值,后面就不对这两部分进行讲解。 - index block:存储的是索引数据,即可以根据index block中的数据快速定位到数据处于哪个data block的哪个位置。
- footer:脚注数据,每个footer数据信息大小固定,存储一个sstable文件的元信息(meta data)。
可以看到,上面这几部分数据,从文件的组织来看自上而下,先有了数据再有索引数据,最后才是文件自身的元信息。原因在于:索引数据是针对数据的索引信息,在数据没有写完毕之前,索引信息还会发生改变,所以索引数据要等数据写完;而元信息就是针对索引数据的索引,同样要依赖于索引信息写完毕才可以。
block
上面几部分数据中,除去footer之外,内部都是以block的形式来组织数据,接着看block的结构,如下图:
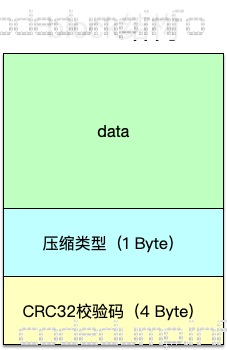
从上面看出,实际上存储数据的block大同小异:最开始的一部分存储数据,然后存储类型,最后一部分存储这个block的校验码以做合法性校验。
以上只是对block大体结构的分析,在数据部分,每一条数据记录leveldb使用前缀压缩(prefix-compressed)方式来存储。这种算法的原理是: 针对一组数据,取出一个公共的前缀,而在该组中的其它字符串只保存非公共的字符串做为key即可,由于sstable保存KV数据是严格按照key的顺序来排序的,所以这样能节省出保存key数据的空间来。
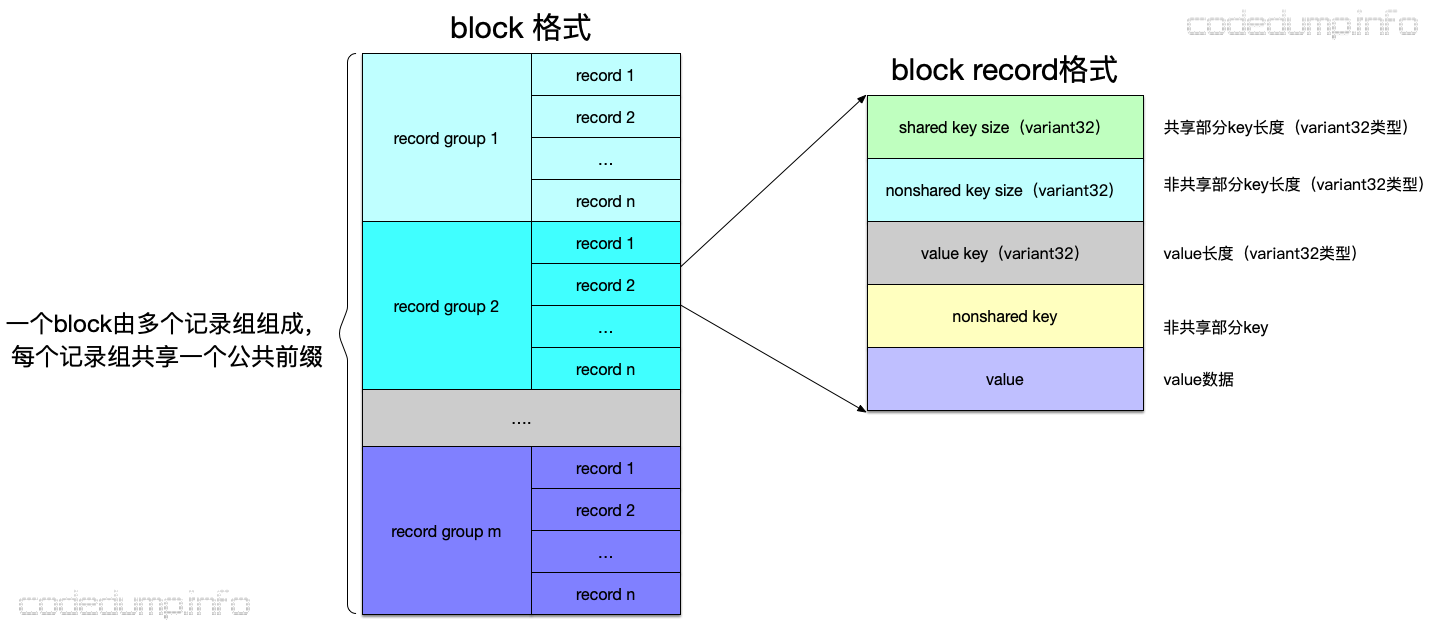
如下图所示:一个block内部划分了多个记录组(record group),每个记录组内部又由多条记录(record)组成。在同一个记录组内部,以本组的第一条数据的键值做为公共前缀,后续的记录数据键值部分只存放与公共前缀非共享部分的数据即可。
以记录的三个数据
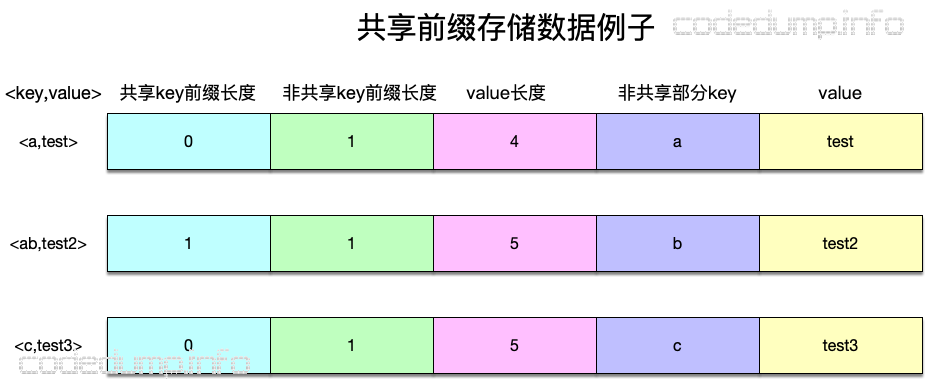
说明如下:
因为一个block内部有多个记录组,因此还需要另外的数据来记录不同记录组的位置,这部分数据被称为“重启点(restart point)”,重启点首先会以数组的形式保存下来,直到该block数据需要落盘的情况下才会写到block结尾处。
有了以上的准备,就可以来具体看添加数据的代码了,向一个block中添加数据的伪代码如下。
(对应BlockBuilder::Add函数)
如果当前记录组的数据数量少于Options->block_restart_interval:
说明一个记录组还没有填充完毕
计算与本组共享前缀的长度
否则:
说明一个记录组填充完毕
向重启点数组写入本记录组长度
重置记录组数据计数器
计算非共享前缀长度
写入共享前缀长度(varint32类型)
写入非共享前缀长度(varint32类型)
写入数据长度(varint32类型 )
写入key的非共享前缀+数据
递增记录组数据计数器
有了前面的这些准备,再在前面block格式的基础上展开,得到更加详细的格式如下:
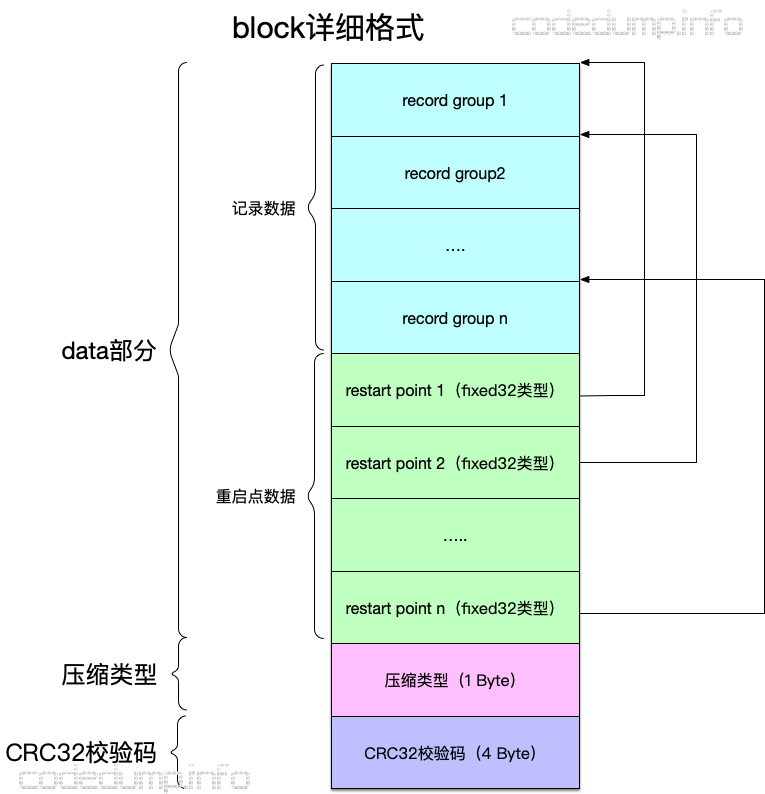
block详细格式还是划分为三大部分,其中:
- 数据部分
- 多个记录组组成的记录数据。
- 多个重启点数据组成的重启点数组数据,每个元素记录对应的记录组在block中的偏移量,类型为fixed32类型。
- 压缩类型,大小为1 Byte。
- CRC32校验数据,大小为4 Byte。
footer
footer做为存储sstable文件原信息部分的数据,格式相对简单,如下图:
iterator的设计
迭代器的设计是leveldb中的一大亮点,leveldb设计了一个虚拟基类Iterator,其中定义了诸如遍历、查询之类的接口,而该基类有多种实现。原因在于:leveldb中存在多种数据结构和多种使用场景,如:
- 保存内存中数据的memtable。
- 保存落盘数据的sstable,而就前面分析而言,一个sstable中还有不同的block,需要根据index block来定位数据处于哪个data block。
- 进行合并的时候,每次最多合并两个层次的文件,在这个过程中需要对待合并的文件集合进行遍历。前面分析的DBImpl::DoCompactionWork函数,就是通过iterator来遍历待合并文件进行合并操作的。
逐个来看不同的iterator实现以及其使用场景。
迭代器大体分为两类:
- 底层迭代器:处于最底层,直接访问底层数据结构,而不依赖于其他迭代器的迭代器。
- 组合迭代器:组合各种迭代器(包括底层和组合迭代器)完成工作的迭代器。
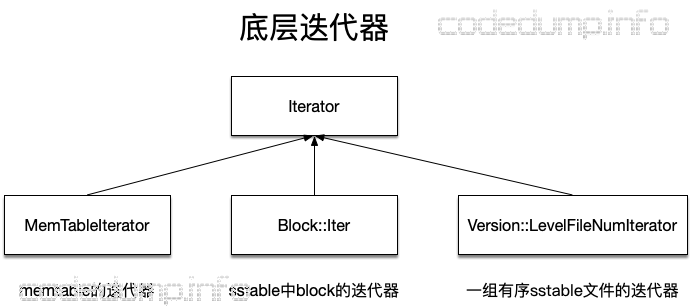
底层迭代器
底层迭代器有以下三种:
- MemTableIterator:用于实现对memtable的迭代遍历,由于memtable由skiplist实现,因此内部封装了对skiplist的迭代访问。
- Block::Iter:前面分析sstable的时候,讲到一个sstable内部其实有多个block组成,这个迭代器就是按照block的结构进行迭代访问的迭代器。
- Version::LevelFileNumIterator:每个level都由多个sstable文件组成,说白了就是一个sstable类型的数组。除了level 0之外,其余level的sstable的键值之间没有重叠关系,而LevelFileNumIterator就是用于迭代一组有序sstable文件的迭代器。
组合迭代器
组合迭代器内部都包含至少一个迭代器,组合起来完成迭代工作,有如下几类。
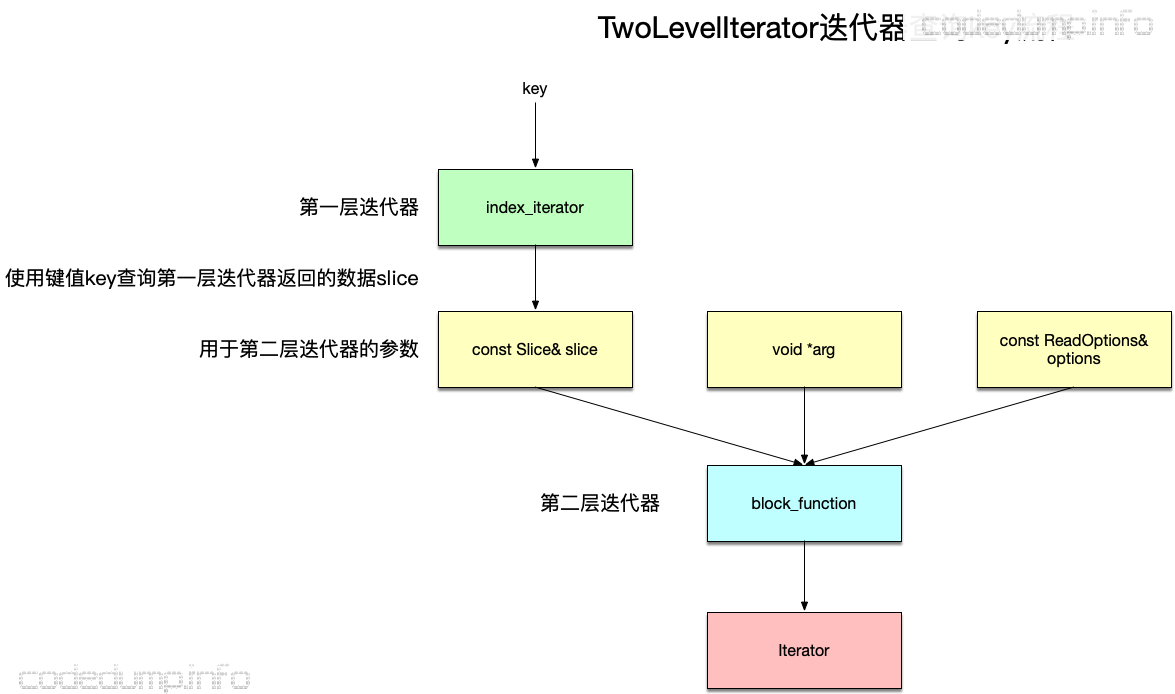
TwoLevelIterator
顾名思义,TwoLevelIterator表示两层迭代器,创建TwoLevelIterator的函数原型为:
typedef Iterator* (*BlockFunction)(void*, const ReadOptions&, const Slice&);
extern Iterator* NewTwoLevelIterator(
Iterator* index_iter,
Iterator* (*block_function)(
void* arg,
const ReadOptions& options,
const Slice& index_value),
void* arg,
const ReadOptions& options);
参数说明如下:
- Iterator* index_iter:索引迭代器,可以理解为第一层的迭代器。
- BlockFunction *block_function:这是一个函数指针,根据index_iter迭代器的返回结果来再创建一个迭代器,即针对查询索引返回数据的迭代器。其函数参数有三个,其中前面两个由下面的arg以及options参数指定,而第三个参数slice就是index_iterator返回的索引数据。
- void* arg:传入BlockFunction函数的第一个参数。
- const ReadOptions& options:传入BlockFunction函数的第二个参数。
综合以上,TwoLevelIterator的工作流程如下:
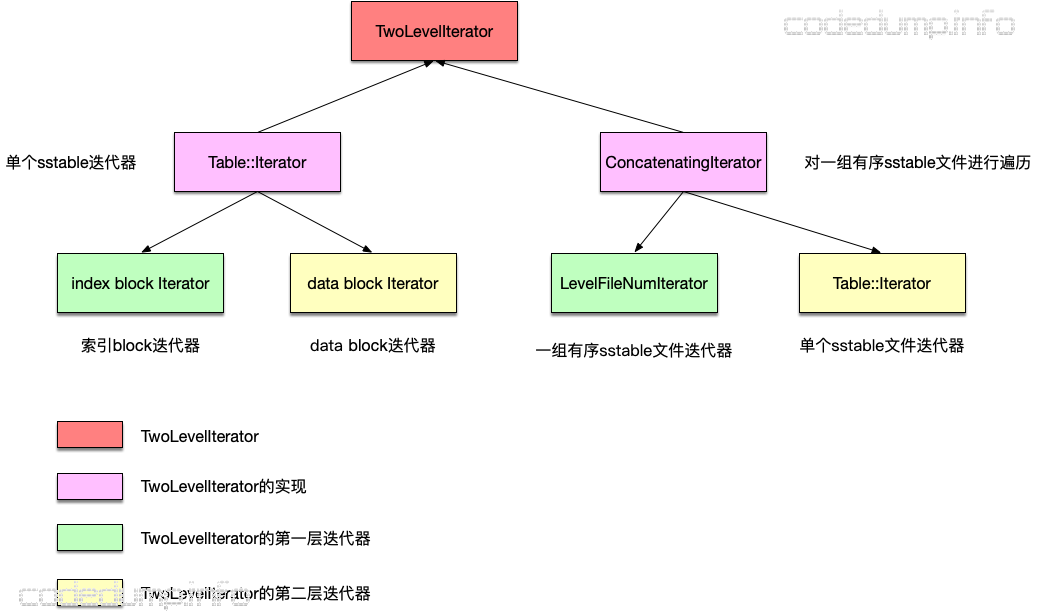
TwoLevelIterator有如下两类:
- Table::Iterator:实现对于单个sstable文件的迭代。由于一个sstable文件中有多个block,而又划分为index block和data block,查询数据时,先根据键值到index block中查询到对应的data block,再进入data block中进行查询,这个查询过程实际就是一个两层的查找过程:先查索引数据,再查数据。因此Table::Iterator类型的TwoLevelIterator,组合了index block的Block::Iter,以及data block的Block::Iter。
- ConcatenatingIterator:组合了LevelFileNumIterator以及Table::Iterator,用于在某一层内的sstable文件中查询数据。因此它的第一层迭代器就是前面的LevelFileNumIterator,用于根据一个键值在一组有序的sstable文件中定位到所在的文件,而第二层的迭代器是Table::Iterator,用于在第一层迭代器LevelFileNumIterator中查询到的sstable文件中查询键值。另外,既然ConcatenatingIterator处理的是有序sstable文件,那么level 0的sstable文件就不会使用这种迭代器进行访问,因为level 0文件之间有重叠键值。
MergingIterator
用于合并流程的迭代器。在合并过程中,需要操作memtable、immutable memtable、level 0 sstable以及非level 0的sstable,该迭代器将这些存储数据结构体的迭代器,统一进行归并排序:
- memtable以及immutable memtable:使用前面提过的MemtableIterator迭代器。
- level 0 sstable:由于level 0的sstable文件之间键值有重叠,所以使用的是level 0的sstable文件各自的Table::Iterator。
- level 1层级及以上的sstable:使用前面介绍过的ConcatenatingIterator,即可以针对一组有序sstable文件进行遍历的iterator。
由于以上每种类型的iterator,内部遍历数据都是有序的,所以MergingIterator内部做的事情,就是将对这些iterator的遍历结果进行“归并”。MergingIterator内部有如下变量:
const Comparator* comparator_:用于键值比较的函数operator。IteratorWrapper* children_:存储传入的iterator的数组。int n_:children_数组的大小。IteratorWrapper* current_:保存当前查询到的位置所在的iterator。Direction direction_:保存查找的方向,有向前和向后两种查询防线。
可以看到,current_以及direction_两个成员是用于保存当前查找状态的成员。
构建MergingIterator迭代器传入的Comparator是InternalKeyComparator,其比较逻辑是:
- 首先比较键值是否相等,不相等则直接返回比较结果。
- 如果键值相等,那么从键值中decode出来sequence值,对比sequence值,对sequence值进行降序比较。由于这个值是单调递增的,因此越新的数据sequence值越大。换言之,在存储层次中(依次为memtable->immutable memtable->level 0 sstable->level n sstable)越靠上面的数据,在键值相同的情况下越小。
Seek(target)函数的伪代码:
遍历所有children_成员:
调用每个成员的Seek(target)函数,这样每个iterator都移动到了target响应的位置。
调用FindSmallest函数,查询到children_成员中当前位置最小的iterator,保存到current_指针中。
修改查找方向为向前查找。
而FindSmallest函数的实现,是遍历children_找到最小的child保存到current_指针中。前面分析InternalKeyComparator提到过,相同键值的数据,根据sequence值进行降序排列,即数据越新的数据其sequence值越大,在这个排序中查找的结果就越在上面。因此,FindSmallest函数如果在memtable、level 0中都找到了相同键值,将优先选择memtable中的数据。
MergingIterator迭代器的其它实现不再做解释,简单理解:针对一组iterator的查询结果进行归并排序。对于同样一个键值,只取位置在存储位置上最靠上面的数据。
这么做的原因在于:一个键值的数据可能被写入多次,而需要以最后一次写入的数据为准,合并时将丢弃掉不在存储最上面的数据。
以下面的例子来说明MergingIterator迭代器的合并结果。
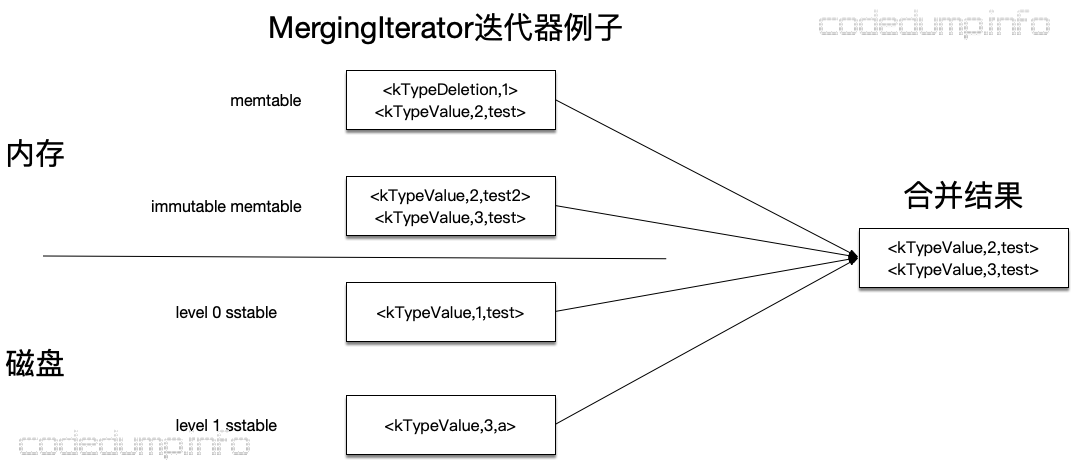
在上图的左半边,是合并前的数据分布情况,依次为:
- memtable:键值1的删除记录,以及键值<2,test>。
- immutable memtable:键值<2,tesat2>以及<3,test>。
- level 0 sstable:键值<1,test>。
- level 1 sstable:键值<3,a>。
合并的结果如上图的右边所示:
- 键1:因为第一条键1的记录是在memtable中的删除记录,所以键1将被删除,即不会出现在合并结果中。
- 键2:最靠上面的关于键2的存储记录是<2,test>,这条记录保存在合并结果中,而immutable memtable的记录<2,test2>将被丢弃,因为这条记录不是最新的。
- 键3:使用了immutable memtable中的记录<3,test>,丢弃了level 1 sstable中的<3,a>这条记录。
核心流程
有了前面几种核心数据结构的了解,下面谈leveldb中的几个核心流程。
修改流程
修改数据,分为两类:正常的写入数据操作以及删除数据操作。
先看正常的写入数据操作:
- append一条记录到log文件中,虽然这是一次写磁盘操作,但是由于是在文件末尾做的顺序写操作,所以效率并不低。
- 向当前的memtable中写入一条数据。这个动作看似简单,但是如果在来不及合并的时候,可能会出现阻塞,在后面合并操作中再展开解释。
完成以上两步之后,就可以认为完成了更新数据的操作。实际上只有一次文件末尾的顺序写操作,以及一次写内存操作,如果不考虑会被合并操作阻塞的情况,实际上还是很快的。
再来看删除数据操作。leveldb中,删除一个数据,其实也是添加一条新的记录,只不过记录类型是删除类型,代码中通过枚举变量定义了这两种操作类型:
enum ValueType {
kTypeDeletion = 0x0,
kTypeValue = 0x1
}
这样看起来,leveldb删除数据时,并不会真的去删除一条数据,而是打上了一个标记,那么问题就来了:如果写入数据操作与删除数据操作,只是类型不同,在查询数据的时候又如何知道数据是否存在?看下面的读数据流程。
读流程
向leveldb中查询一个数据,也是从上而下,先查内存然后到磁盘上的sstable文件查询,如下图所示:
- 先在内存中的memtable中查询数据,查到则返回;
- 否则在磁盘中的sstable文件中查询数据,从0级开始往下查询,查到则返回;
这样自上而下的原因就在于leveldb的设计:越是在上层的数据越新,距离当前时间越短。
举例而言,对于键值key而言,首先写入kv对
那么,前面写入的数据实际上已经没有用了,但是又占用了空间,这部分数据就等待着后面的合并流程来合并数据最后删除掉。
合并流程
核心数据结构
首先来看与合并相关的核心数据结构。
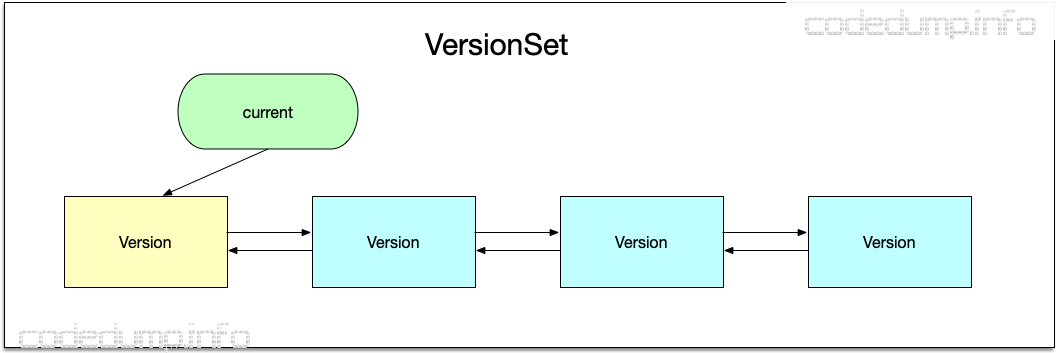
每一次合并过程以及将memtable中的数据落盘到sstable的过程,都涉及到sstable文件的增删,而这每一次操作,都对应到一个版本。
在leveldb中,使用Version类来存储一个版本的元信息,主要包括:
- std::vector files_[config::kNumLevels]:用于存储所有级别sstable文件的FileMetaData数组,可以看到这个成员是一个数组,而数组的每个元素又是一个vector,这其中数组部分使用level级别来进行索引,同级别的sstable信息存储在vector中。
FileMetaData* file_to_compact_和int file_to_compact_level_:下一次进行合并时的文件和级别。double compaction_score_和int compaction_level_:当前最大compact分数和对应的级别,在Finalize函数中进行计算,具体计算的规则会在下面介绍。
可以看到,Version保存的主要是两类数据:当前sstable文件的信息,以及下一次合并时的信息。
所有的级别,也就是Version类,使用双向链表串联起来,保存到VersionSet中,而VersionSet中有一个current指针,用于指向当前的Version。
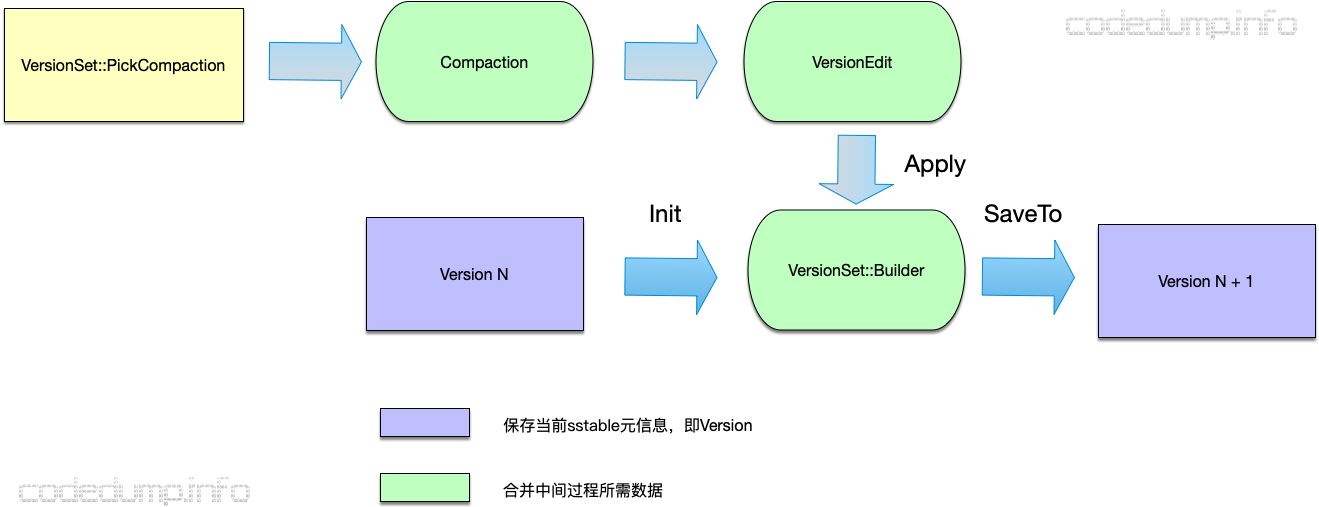
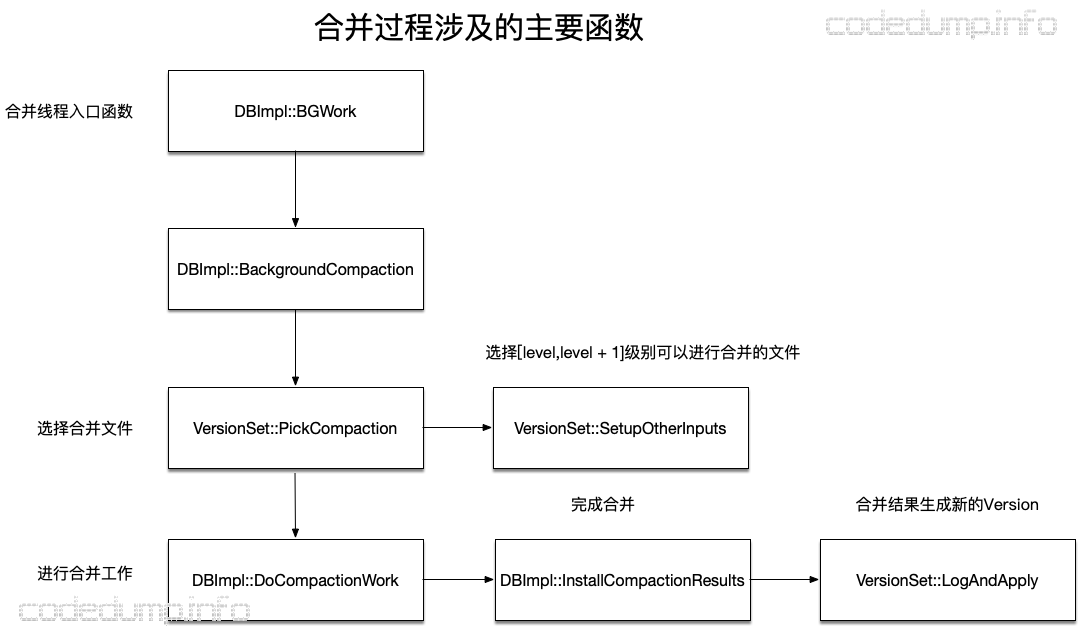
当进行合并时,首先需要挑选出需要进行合并的文件,这个操作的入口函数是VersionSet::PickCompaction,该函数的返回值是一个Compaction结构体,该结构体内部保存合并相关的信息,Compaction结构体中最重要的成员是VersionEdit类成员,这个成员用于保存合并过程中有删减的sstable文件:
DeletedFileSet deleted_files_:合并后待删除的sstable文件。std::vector< std::pair > new_files_:合并后新增的sstable文件。
可以认为:version N + version N edit = version N + 1,即:第N版本的sstable信息,在经过该版本合并的VersionEdit之后,形成了Version N+1版本。
另外还有一个VersionSet::Builder,用于保存合并中间过程的数据,其本质是将所有VersoinEdit内容存储到VersionSet::Builder中,最后一次产生新版本的Version。
合并条件及原理
leveldb会不断产生新的sstable文件,这时候需要对这些文件进行合并,否则磁盘会一直增大,查询速度也会下降。
这部分讲解合并触发的条件以及进行合并的原理。
leveldb大致在以下两种条件下会触发合并操作:
- 需要新生成memtable的情况下,此时必然会把原来的memtable切换为immutable memtable,后者又需要及时落盘成为新的sstable文件,将immutable memtable数据落盘为sstable文件的流程称为”minor compaction“,因为有新的sstable文件产生,所以需要合并文件减少sstable文件的数量。
- 查询数据时,某些sstable总是查找不到数据,此时可能是因为数据太过分散了,也需要将文件合并。
以上两种情况,对应到leveldb代码中就是以下几个地方:
- 调用DB::Open文件打开数据库文件时,由于之前可能已经存在了一些文件,这时会做检查,满足条件的情况下会进行合并操作。
- 调用DB::Write函数写入数据时,调用MakeRoomForWrite函数分配空间,此时如果需要新分配一个memtable,也会触发合并操作。
- 调用DB::Get函数查询数据时,某些文件查询的次数超过了阈值,此时也会进行合并操作。
另外还需要提一下合并的两种类型:
- minor compaction:将内存的数据落地到磁盘上的迁移过程,对应于leveldb就是将immutable memtable数据落盘为sstable文件的流程。
- major compaction:sstable之间的文件进行合并的流程。
选择进行合并的文件
函数VersionSet::PickCompaction用于构建出一次合并对应的Compaction结构体。来看这个函数主要的流程。
在挑选哪些文件需要合并时,依赖于两个原则:
- 首先考虑每一层文件的数量:这个数量的计数,对应到Version的compaction_score_中,在每次VersionSet::Finalize函数中,都会首先进行预计算这个值,那个级别的分数高,下一次就优先选择该层次来做合并。对于不同的层次,计算的规则也不同:
- level 0:0级文件的数量除以kL0_CompactionTrigger来计算分数。
- 非0级:该层次的所有文件大小/MaxBytesForLevel(level)来计算分数。
- 如果上面的计算中,compaction_score_为0,那么就需要具体针对一个文件来进行合并。leveldb中,在FileMetaData结构体里有一个成员allowed_seeks,表示在该文件中查询某个键值时最多允许的定位次数,当这个值为0时,意味这个文件多次查询都没有查询到数据,因此这个文件就需要进行合并了。
文件的allowed_seeks在VersionSet::Builder::Apply函数中进行计算:
// We arrange to automatically compact this file after
// a certain number of seeks. Let's assume:
// (1) One seek costs 10ms
// (2) Writing or reading 1MB costs 10ms (100MB/s)
// (3) A compaction of 1MB does 25MB of IO:
// 1MB read from this level
// 10-12MB read from next level (boundaries may be misaligned)
// 10-12MB written to next level
// This implies that 25 seeks cost the same as the compaction
// of 1MB of data. I.e., one seek costs approximately the
// same as the compaction of 40KB of data. We are a little
// conservative and allow approximately one seek for every 16KB
// of data before triggering a compaction.
// 对上面这段注释的翻译:
// 这里将在特定数量的seek之后自动进行compact操作,假设:
// (1) 一次seek需要10ms
// (2) 读、写1MB文件消耗10ms(100MB/s)
// (3) 对1MB文件的compact操作时合计一共做了25MB的IO操作,包括:
// 从这个级别读1MB
// 从下一个级别读10-12MB
// 向下一个级别写10-12MB
// 这意味着25次seek的消耗与1MB数据的compact相当。也就是,
// 一次seek的消耗与40KB数据的compact消耗近似。这里做一个
// 保守的估计,在一次compact之前每16KB的数据大约进行1次seek。
// allowed_seeks数目和文件数量有关
f->allowed_seeks = (f->file_size / 16384);
// 不足100就补齐到100
if (f->allowed_seeks < 100) f->allowed_seeks = 100;
如果是第一种情况,即compaction_score_ >= 1的情况来选择合并文件,还涉及到一个合并点的问题(compact point),即leveldb会保存上一次进行合并的键值,这一次会从这个键值以后开始寻找需要进行合并的文件。
而如果合并层次是0级,因为0级文件中的键值有重叠的情况,因此还需要遍历0级文件中键值范围与这次合并文件由重叠的一起加入进来。
在这之后,调用VersionSet::SetupOtherInputs函数,用于获取同级别以及更上一层也就是level + 1级别中满足合并范围条件的文件,这就构成了待合并的文件集合。
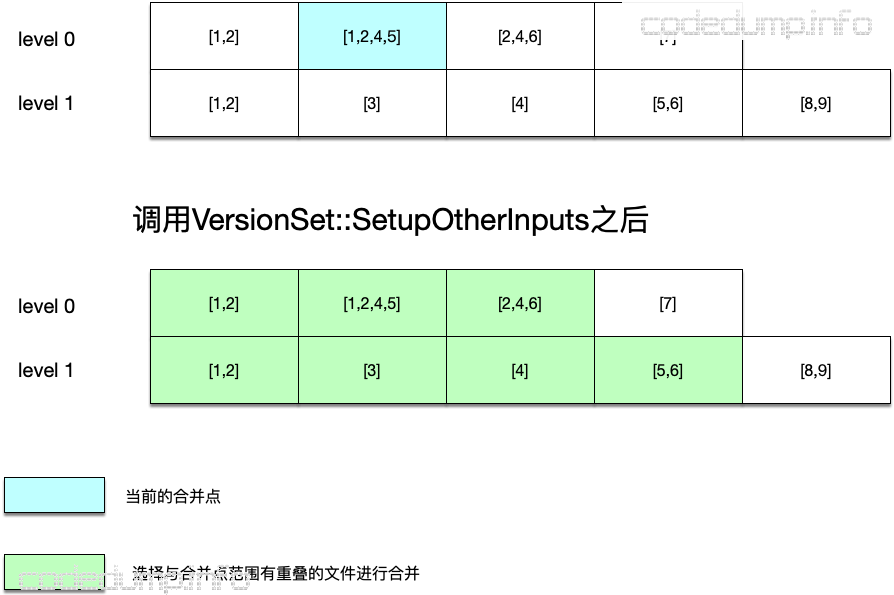
如上图所示:
- 此时选择进行合并的文件,其键值是[1,2,4,5]。
- 由于该文件在level 0级别,sstable文件的键值有重叠,同时还在在其上面一层选择同样键值范围有重叠的sstable文件,选择的结果就是绿色的sstable文件,这些将做为这次合并进行归并排序的文件。
合并流程
以上调用VersionSet::PickCompaction函数选择完毕了待合并的文件及层次之后,就来到DBImpl::DoCompactionWork函数中进行实际的合并工作。
该函数的原理不算复杂,就是遍历文件集合进行合并:
创建一个针对合并集合的iterator迭代器
循环:
如果当前存在immutable memtable:
将immutable memtable落盘生成sstable
唤醒等待在MakeRoomForWrite的线程
从迭代器中取出一个键值key
如果Compaction::ShouldStopBefore(key)返回true:
如果该键值在level+2层次的重叠太多,落盘生成sstable
如果该键值比快照的数据键值还小:
不需要保存
如果该键值的类型为删除类型同时这个层次是该键值的最低层次:
不需要保存
只有在上面检测通过可以进行保存的情况下:
写入Compaction::builder中,当写入大小满足sstable文件大小时,落盘生成新的sstable文件
出了循环之后,如果还有数据没有保存落盘到sstable:
落盘写入sstable文件
调用LogAndApply函数存储合并结果,即将VersionEdit数据应用到生成新的Version。
合并操作对读写流程的影响
leveldb将用户的读写操作,与合并工作放在不同的线程中处理。当用户需要写入数据进行分配空间时,会首先调用DBImpl::MakeRoomForWrite函数进行空间的分配,该函数有可能因为合并流程被阻塞,有以下几种可能性:
如果当前0级文件数量大于等于kL0_SlowdownWritesTrigger:
休眠1000ms
如果当前memtable的大小小于等于options\_.write_buffer_size:
说明还有空间供写入数据,退出循环
如果当前0级文件数量大于等于kL0_StopWritesTrigger:
说明0级文件太多,需要暂停写入,直到被唤醒。
在前面的分析过的DBImpl::DoCompactionWork函数中,将immutable memtable落盘生成sstable就会唤醒等待在这里的线程
其余的情况:
说明需要将memtable切换到immutable memtable,重新生成一个memtable,同时调用MaybeScheduleCompaction函数尝试进行合并操作。